Under-actuated self-adaptive anthropomorphic manipulator
A manipulator and self-adaptive technology, applied in the field of robotics, can solve the problems of increasing the difficulty of system control, restricting applications, and low degree of anthropomorphism, and achieve the effects of simple and fast unlocking methods, preventing objects from falling off, and a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings.
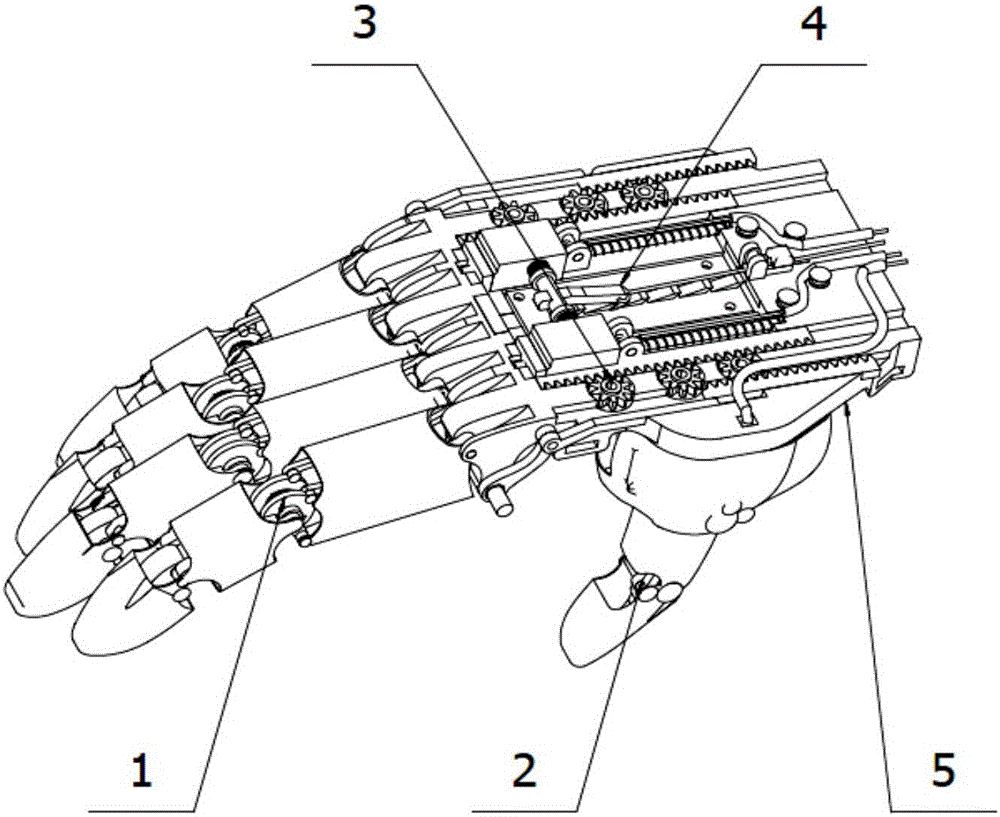
[0032] see figure 1 , the underactuated self-adaptive anthropomorphic manipulator of the present invention includes a four-finger module 1 , a thumb module 2 , a transmission module 3 , a self-locking module 4 , and a housing module 5 .
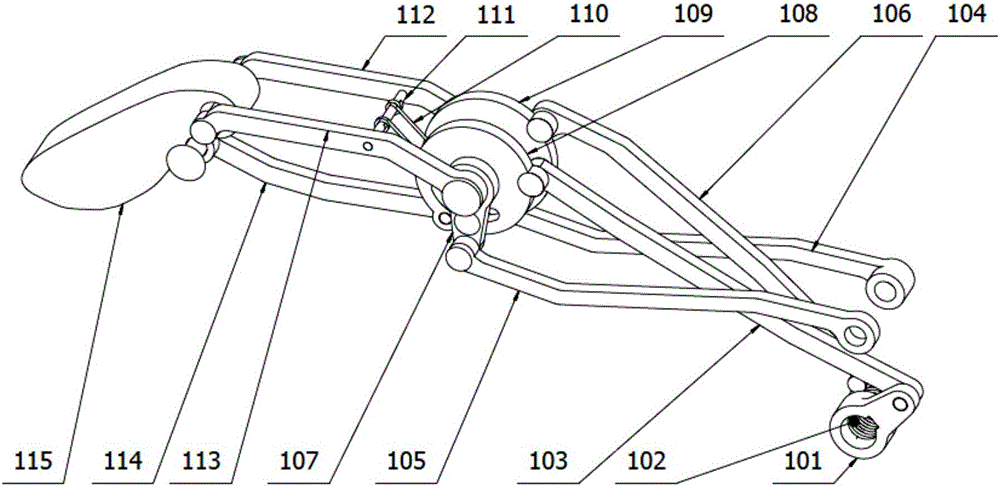
[0033] see figure 2, the four-finger module 1 is composed of four parts: the index finger, the middle finger, the ring finger and the little finger, with the same structure, and the index finger is used as an example for illustration. One torsion arm of the first torsion spring 102 is inserted into the side of the main shaft connecting rod 101, while the other torsion arm is inserted into the fourth connecting rod 106 of the first knuckle, the first connecting rod 103 of the first knuckle is connected to the main shaft connecting rod 101 through a hinge, and the second torsion arm is inserted into the fourth connecting rod 106 of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More