

Deicing aircraft for power transmission line
A transmission line and aircraft technology, applied in the installation of electrical components, cables, overhead installation, etc., can solve the problems of increased weight of overhead transmission lines, easy to cause electric shock or falling, slow manual de-icing and de-icing, etc. Strong stability, reduce damage, and solve the effect of manual deicing difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
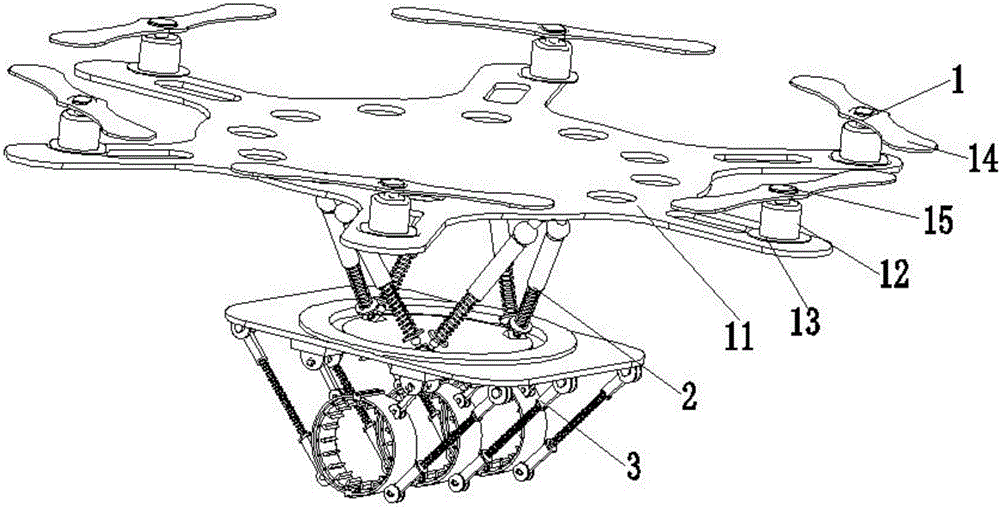
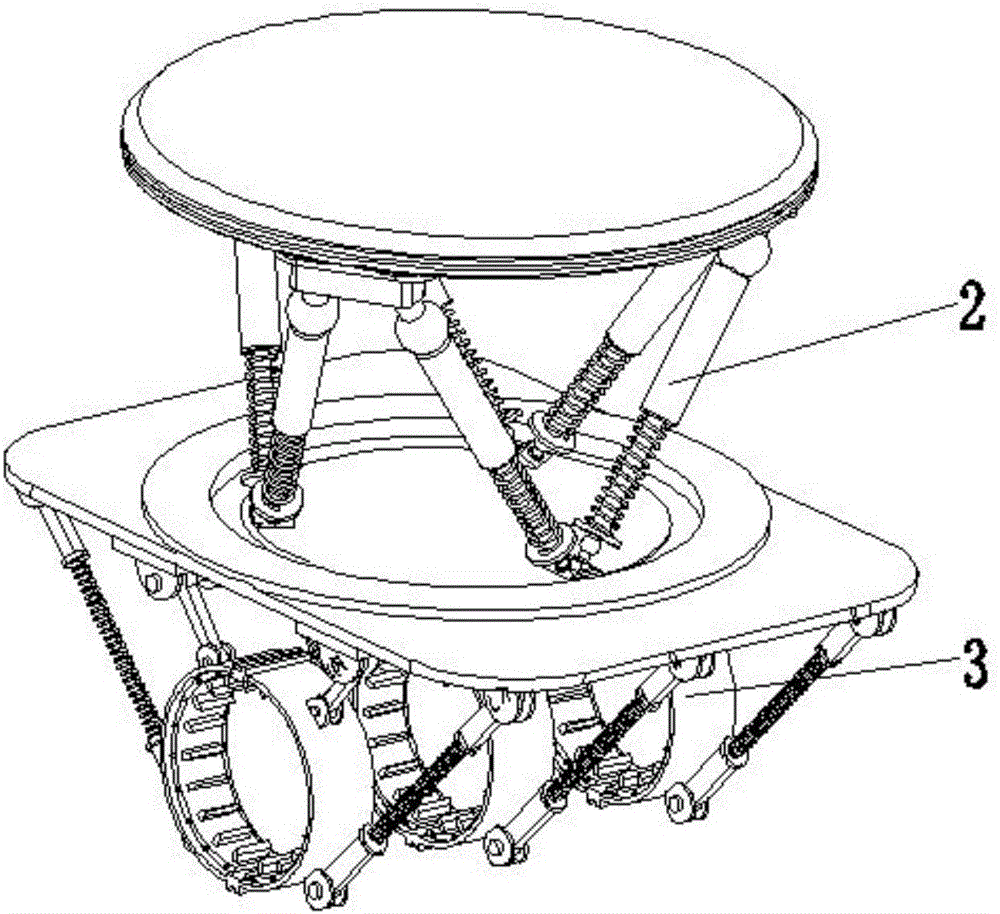
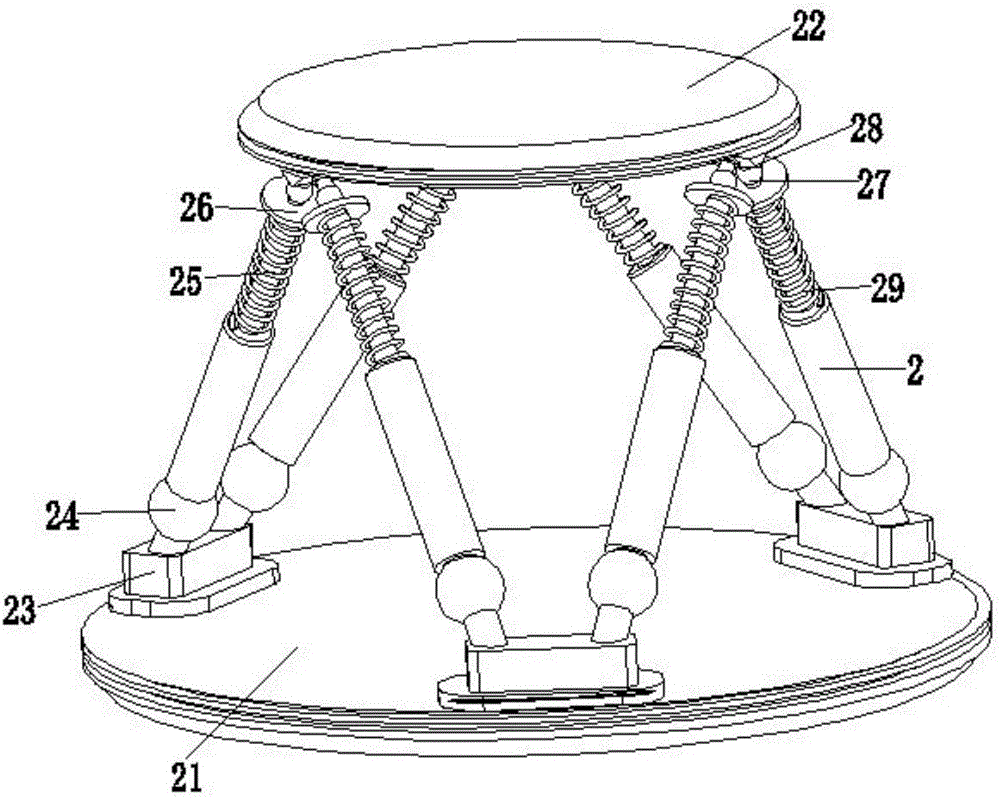
[0021] Such as Figure 1 to Figure 6 As shown, a power transmission line deicing aircraft includes a drone body 1, a six-degree-of-freedom parallel mechanism 2 and a deicing device 3; the six-degree-of-freedom parallel mechanism 2 is located between the drone body 1 and the deicing device 3, and the upper end of the six-degree-of-freedom parallel mechanism 2 is connected to the drone body 1, and the lower end of the six-degree-of-freedom parallel mechanism 2 is connected to the deicing device 3.
[0022] Such as figure 1 As shown, the drone main body 1 includes a frame 11, a servo motor 12, a motor support 13, a propeller 14 and a locking buckle 15, and the servo motor 12, a motor support 13, a propeller 14 and a locking buckle 15 The quantity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More