

Ship longitudinal dynamic stabilization method and device
A technology of an anti-rolling device and a driving device, which is applied in the direction of using hydrofoils to act on the surrounding water surface to reduce the movement of the ship, which can solve the problems of increased hull oscillation, low anti-rolling efficiency, and reduced speed, so as to improve comfort and safety , high anti-rolling efficiency and easy installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0060] In this embodiment, the hydrofoil angle is automatically controlled by closed-loop control, and its specific implementation steps are as follows:
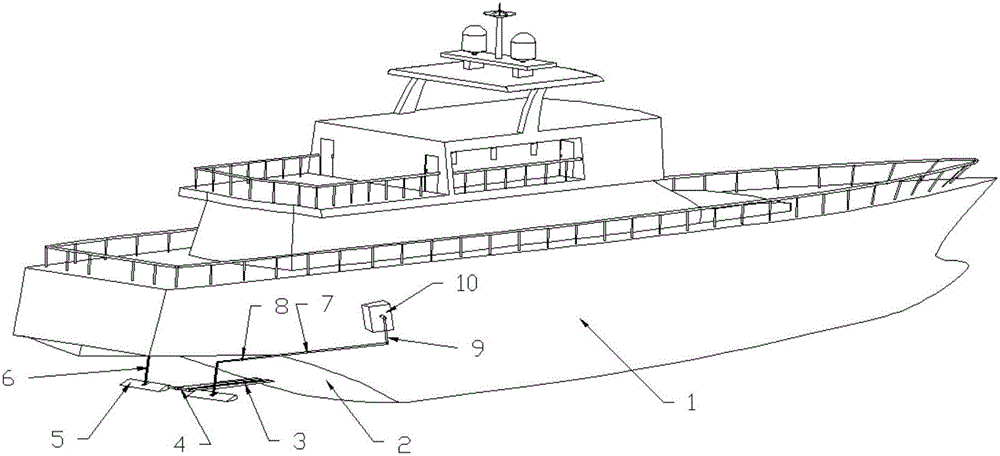
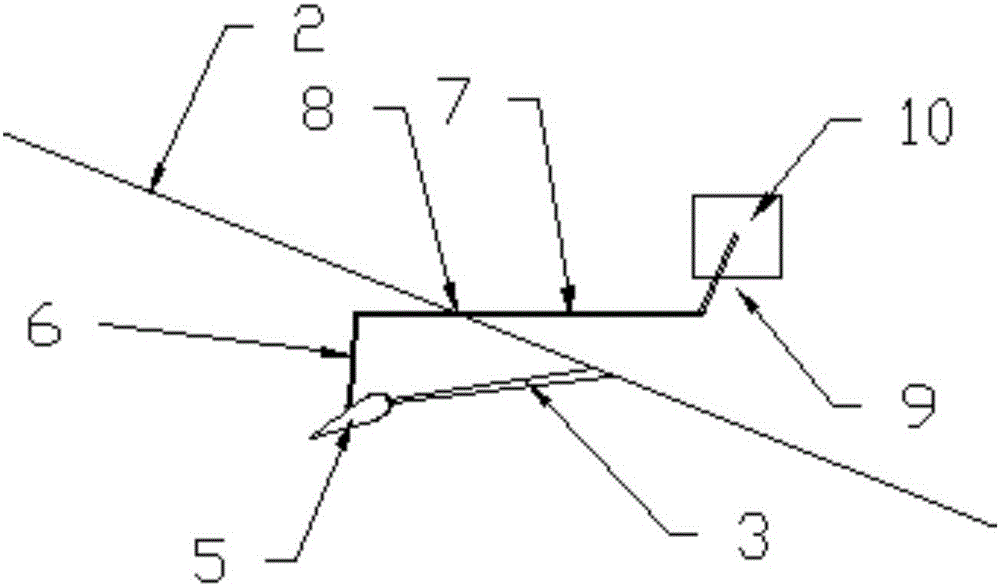
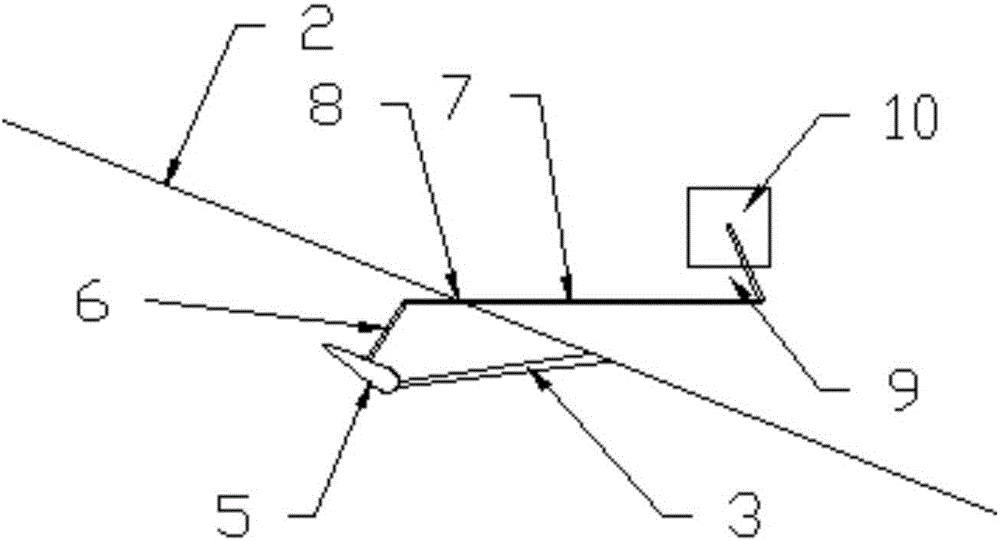
[0061] 1) The hull pitch sensor 13 collects the pitch angular velocity of the hull 1 and outputs a signal. The controller 12 receives the signal from the hull pitch sensor 13 and converts the pitch angular velocity into a pitch angle.
[0062] 2) When the hull reaches the maximum pitch angle, the blade angle of the hydrofoil (5) is adjusted to γ by the driving device. When the pitch angle is the maximum positive value, γ is taken as -30°; when the pitch angle is the maximum negative value value, γ takes +30°. For positive and negative pitch angles see Figure 7 , see the positive and negative of γ Figure 2-4 .
[0063] In this step, the vane angle is γ and is adjusted in the following manner: the controller 12 sends instructions to the drive chip 11, controls the power input stepper motor 10, and stops the stepper moto...
Embodiment 2
[0066] The implementation steps of this embodiment are basically the same as method embodiment 1, and the difference is that in step 2), the blade angle of the hydrofoil 5 is determined by the following formula:
[0067] γ = M 4 ρv 2 A d δ = ( f ( θ ·· ) + f ( θ · ) + f ( θ ) ) - ( f ( θ ·· 1 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More