

Temporary robot obstacle avoidance method based on depth camera
A depth camera and robot technology, applied in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of limited practical application, complex topology network process of topology method, weak generalization, etc. Achieve the effect of being beneficial to the promotion of engineering applications, the method of obstacle avoidance is simple and easy to implement, and it is easy to install and expand
Active Publication Date: 2016-10-26
UNIV OF ELECTRONICS SCI & TECH OF CHINA
View PDF6 Cites 59 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] 1) The visual graph method is inflexible, and the search time is long when there are many obstacles, and the shape of the obstacle should not be close to a circle, which limits its practical application
[0005] 2) The grid method is currently the most researched obstacle avoidance method, but the size of the grid affects the storage capacity and calculation time of environmental information. The larger the grid, the lower the resolution, and the worse the obstacle avoidance effect in complex environments , the smaller the grid, the better the obstacle avoidance effect, but the amount of calculation increases
[0006] 3) The main problem of the topology method is that the process of constructing the topology network is quite complicated, especially how to effectively modify the topology relationship when adding obstacles remains to be solved
[0007] 4) The artificial potential field method regards the movement of the mobile robot in the environment as a movement in an abstract artificial force field. The target point is attractive to the robot, and the obstacle is repulsive to the robot. Finally, it is controlled by the combined force The disadvantage of the robot's movement is that it ignores the structural shape information of obstacles, and the establishment of the model is prone to errors and falls into a local minimum
[0008] 5) For the use of neural network, genetic and other algorithms for obstacle avoidance, the main defect is that the algorithm is too complex, the requirements for the robot's computing power are very high, and the generalization is weak
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
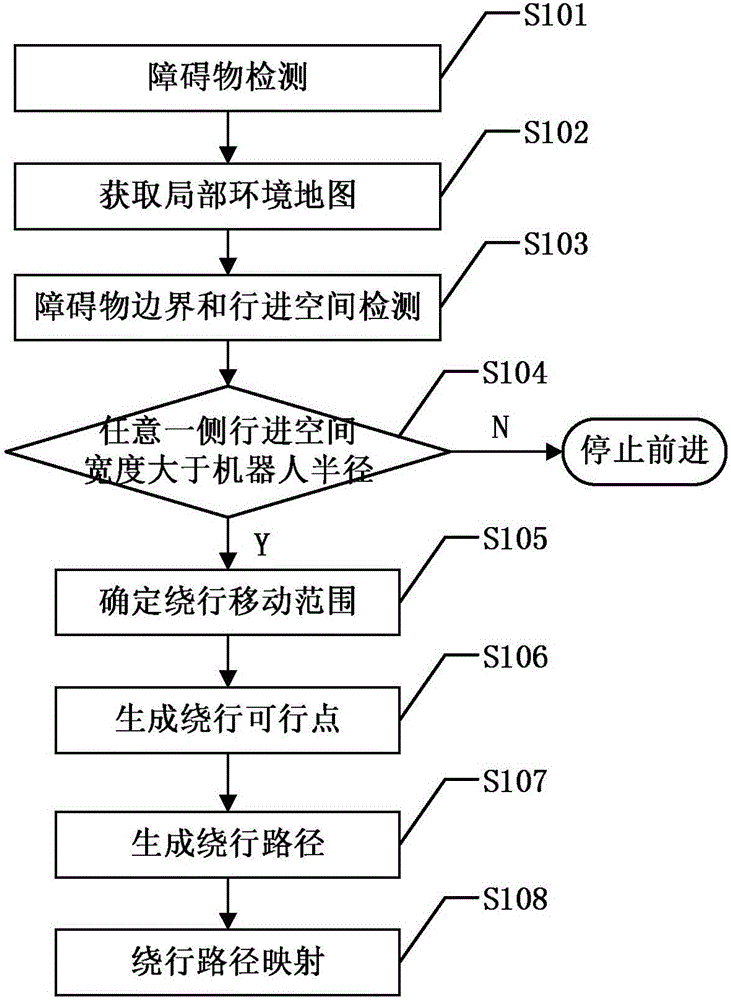
[0033] figure 1 It is a flowchart of the temporary obstacle avoidance method for a robot based on a depth camera in the present invention. Such as figure 1 As shown, the present invention based on depth camera robot temporary obstacle avoidance method comprises the following steps:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a temporary robot obstacle avoidance method based on a depth camera. If a robot detects an obstacle when moving along a set global navigation path, the depth camera installed on the robot is used to shoot through deflecting left and right angles and acquire a depth map; the map is processed so as to acquire a local environment map; in the local environment map, traveling spaces of left and right sides of the obstacle are detected; and the side with a large width is selected and used as a circumambulating traveling space. A circumambulating moving scope rectangular is drawn. Circumambulating feasible points are generated in the circumambulating moving scope rectangular. The feasible points are selected from the circumambulating feasible points so as to generate a circumambulating path. The circumambulating path is mapped into a global map. An end point of the mapped circumambulating path is connected to a next travelling node on an original global navigation path so as to complete temporary obstacle avoidance. By using the method of the invention, temporary robot obstacle avoidance can be high-efficiently and accurately completed; and after circumambulating and the obstacle avoidance, the robot is returned to the original global navigation path so that intelligence of the robot is increased.
Description
technical field [0001] The invention belongs to the technical field of robots and computer vision, and more specifically, relates to a method for temporarily avoiding obstacles of a robot based on a depth camera. Background technique [0002] Mobile robots are an important branch of the robotics field, and intelligent navigation and temporary obstacle avoidance are one of the core technologies of mobile robots. Robot navigation means that the robot independently plans a movement path from the starting point to the target location in a known or unknown environment, so that the robot can smoothly reach the end point along this path; robot temporary obstacle avoidance means that the robot is moving According to the collected real-time environmental information, new obstacles in the environment are found, and obstacles are effectively avoided according to certain methods, so that navigation can proceed smoothly. The traditional robot obstacle avoidance methods mainly include vi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05D1/02
CPCG05D1/0251G05D1/0255G05D1/0274G05D1/242G05D1/246G05D1/622G05D2109/10G05D2111/17G05D2111/20
Inventor程洪王富奎郑亚莉陈诗南骆佩佩
OwnerUNIV OF ELECTRONICS SCI & TECH OF CHINA