

Mobile robot path planning method based on chaotic firefly algorithm
A mobile robot, firefly algorithm technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of slow convergence speed, large amount of calculation, easy to fall into local optimum and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0034] Technical scheme of the present invention is as follows:
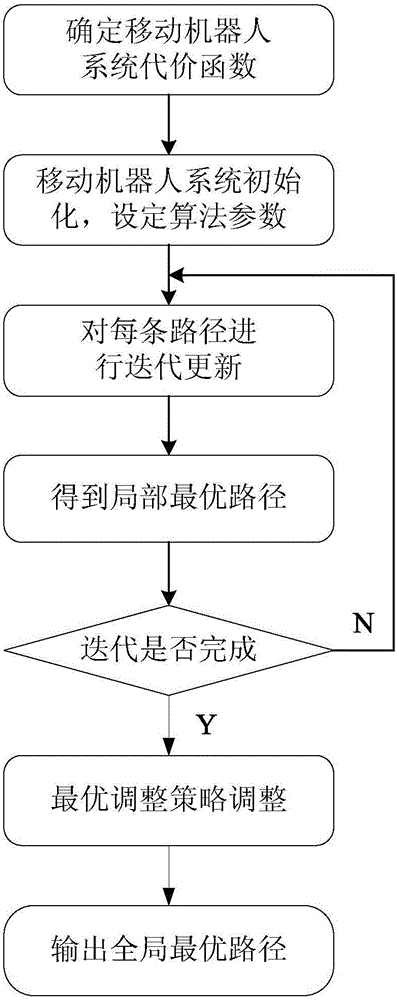
[0035] The present invention provides a kind of mobile robot path planning method based on chaotic firefly algorithm, it is characterized in that, comprises the following steps:
[0036] S1, determine the mobile robot system cost function. In this embodiment, the cost function of the mobile robot system is expressed as:
[0037] E=ω 1 E. L +ω 2 E. D
[0038] where ω 1 ,ω 2 denote the length coefficient and risk coefficient respectively, and ω 1 +ω 2 =1, the values are ω 1 =0.75,ω 2 =0.25,E L Indicates the feasible path distance of the mobile robot from the starting point to the target point, E D Represents the cost function ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More