

Fusing method of 3D laser point cloud and 2D image
A two-dimensional image, three-dimensional laser technology, applied in image enhancement, image analysis, image data processing and other directions, can solve the problems of low calculation efficiency, large amount of data, and complicated calculation process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with accompanying drawing.
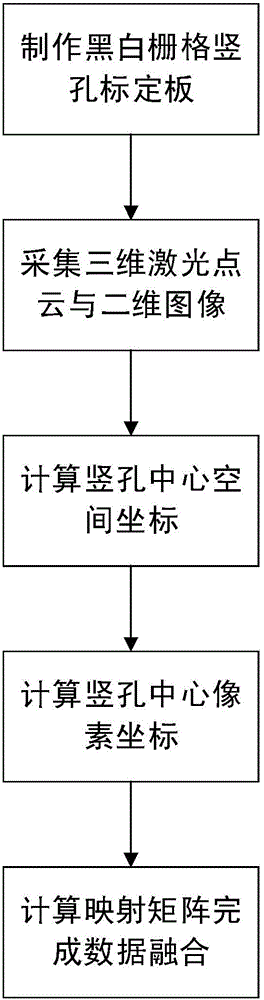
[0061] like figure 1 As shown, a fusion method of a 3D laser point cloud and a 2D image comprises the following steps:
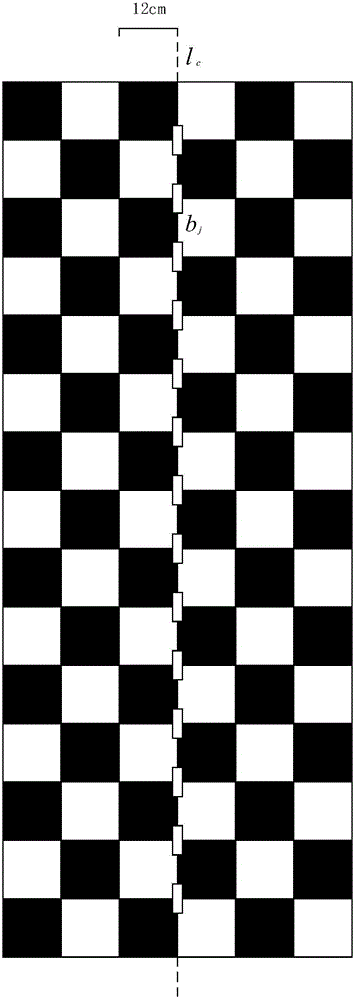
[0062] Step 1. Make a black and white grid vertical hole calibration plate. The size of the calibration plate is 180cm×72cm, and black and white square grids with a side length of 12cm are evenly distributed on it, along the center line of the calibration plate l c 14 vertical holes are evenly arranged B={b j |1≤j≤14}, the length of the vertical hole is 6cm, the width is 2cm, and the center of each vertical hole is c j (1≤j≤14) are located at the corners of the black and white grid, such as figure 2 shown.
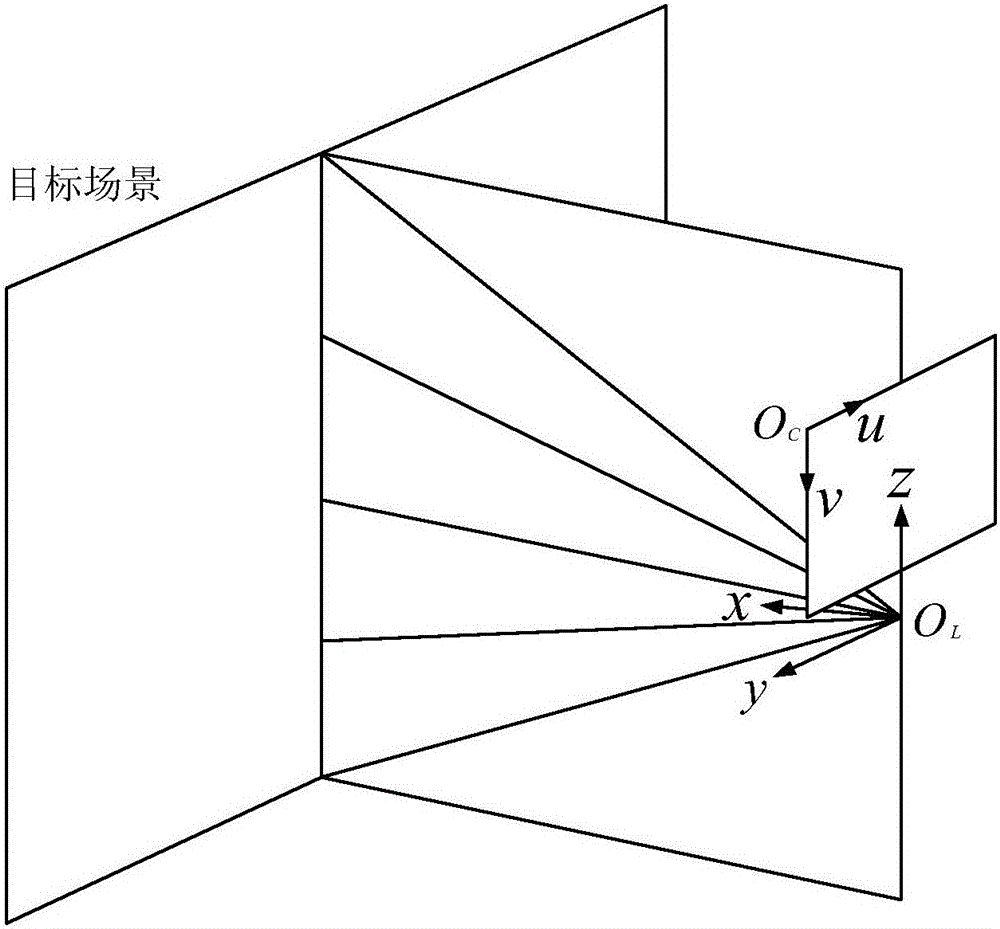
[0063] Step 2. Collect 3D laser point clouds and 2D images, fix the laser scanner and camera, and face the calibration plate vertically to the laser scanner and camera. When scanning with the laser scanner, the reflection of laser light will form...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More