

Dual-arm support rehabilitation training robot and operation method thereof
A technology of rehabilitation training and robotics, which is applied in the direction of manipulators, passive exercise equipment, and equipment to help people walk, etc., can solve the problems of single training mode, low efficiency, and heavy workload of gait rehabilitation training, and achieve enhanced rehabilitation training effects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
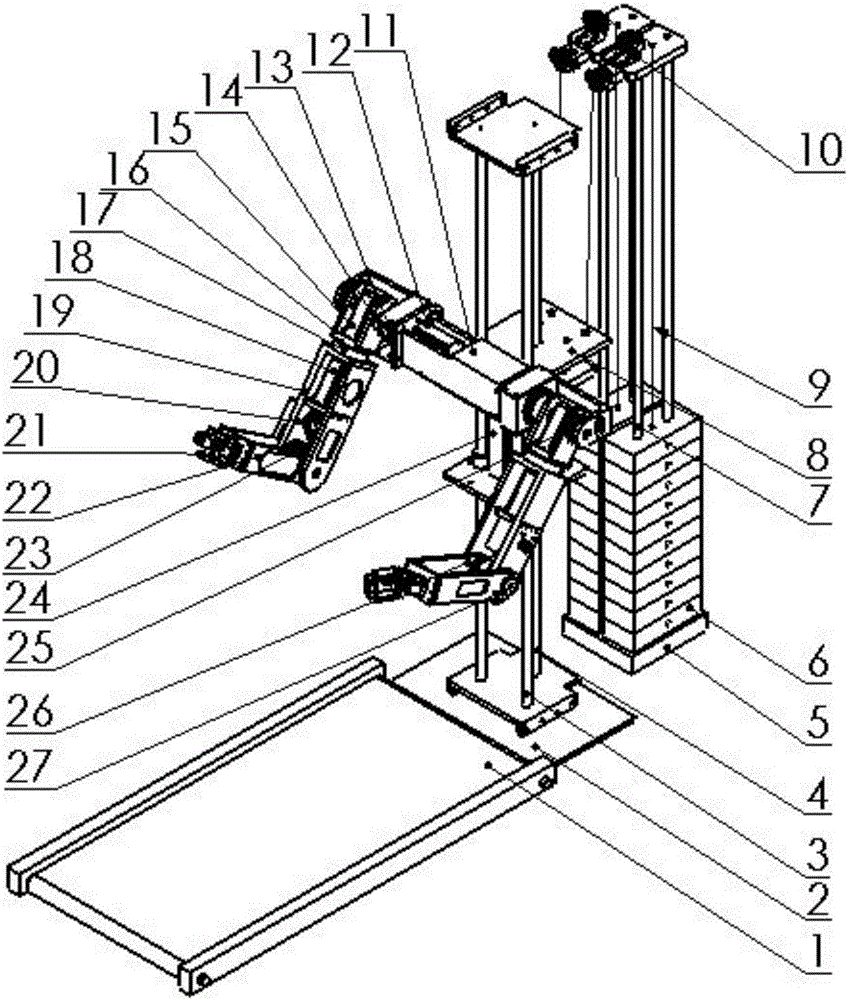
[0021] refer to figure 1 , a dual-arm support rehabilitation training robot according to an embodiment of the present invention includes a crawler walking machine 1, a base 2, a lifting screw mechanism, a manipulator part and a counterweight mechanism.
[0022] The lifting screw mechanism includes guide rod 3, lead screw 4, arm lifting platform 8 and lifting motor 24; the manipulator part includes arm connecting pipe 11, shoulder joint motor 12, internal gear set 13, shoulder joint harmonic reducer 14, and rotary joint Motor 15, large arm support plate 16, rotary joint harmonic reducer 17, elbow joint motor 18, elbow joint support plate 19, bevel gear set 20, wrist universal joint 21, forearm support plate 22, elbow joint harmonic deceleration Device 23, shoulder spring mounting block 25, elbow spring mounting block 26 and elbow join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More