

Four-finger exoskeleton bending and grabbing power mechanism of hand pressure reduction machine exoskeleton device
A power mechanism and exoskeleton technology, applied in the field of four-finger exoskeleton bending and grasping power mechanism, to achieve the effects of easy manufacture, compact and simple structure, and increased weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
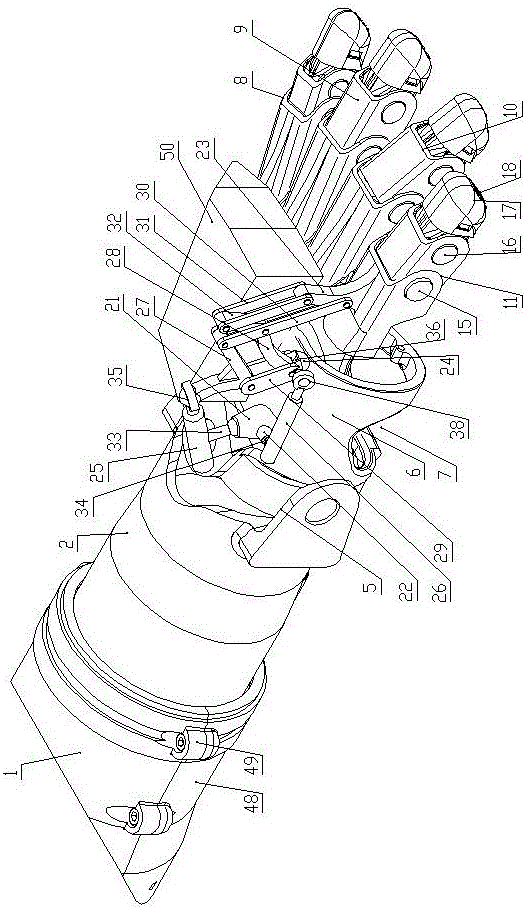
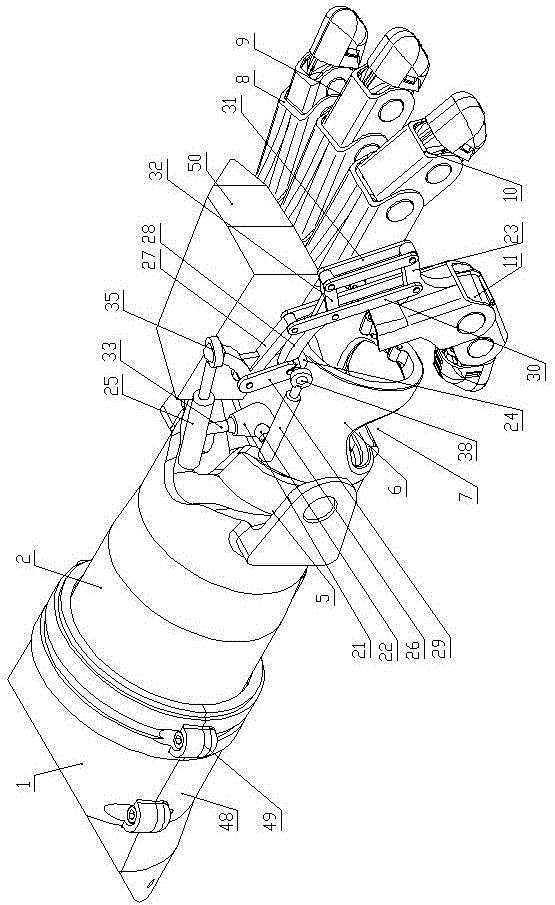
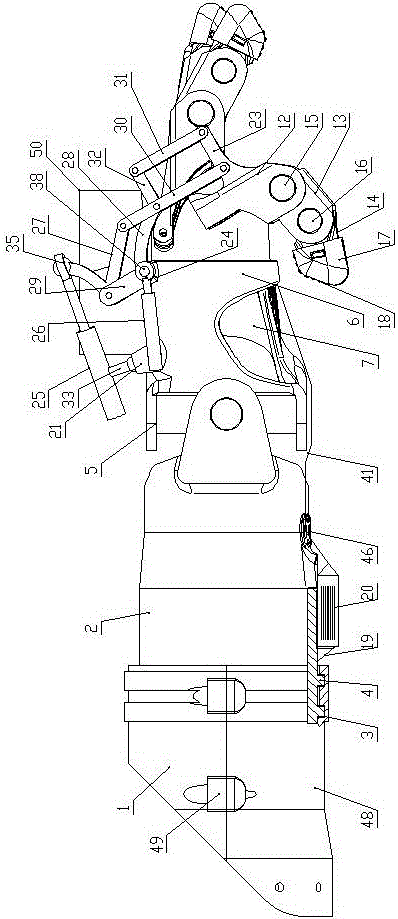
[0030] Such as Figure 1-Figure 6 As shown, the hand decompression mechanical exoskeleton device includes a forearm fixing cylinder and a forearm rotating cylinder 2. Two circular grooves 3 are provided on the front inner wall of the forearm fixing cylinder, and the rear part of the forearm rotating cylinder 2 is inserted into the forearm fixing cylinder. , the outer wall of the forearm rotating cylinder 2 is provided with a rotation limiter in the circular groove 3 and two circular ribs 4, the front end of the forearm rotating cylinder 2 is connected with the palm resting cylinder 6 through the wrist universal joint 5, and the bottom of the palm resting cylinder 6 is left There is a thumb protruding opening 7 on the side or the right side, and the top of the palm placement cylinder 6 is respectively connected to the little finger exoskeleton assembly 8 and ring finger exoskeleton assembly 9 on the front side of the palm placement cylinder 6 through a set of single-drive multi-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More