

A wireless sensor network node localization method based on mobile robot assistance
A technology of mobile robots and wireless sensors, applied in location-based services, wireless communication, network topology, etc., can solve problems affecting positioning reliability, difficulty and cost increase, and increased computing load, so as to improve node positioning accuracy, The effect of overcoming adverse effects and reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
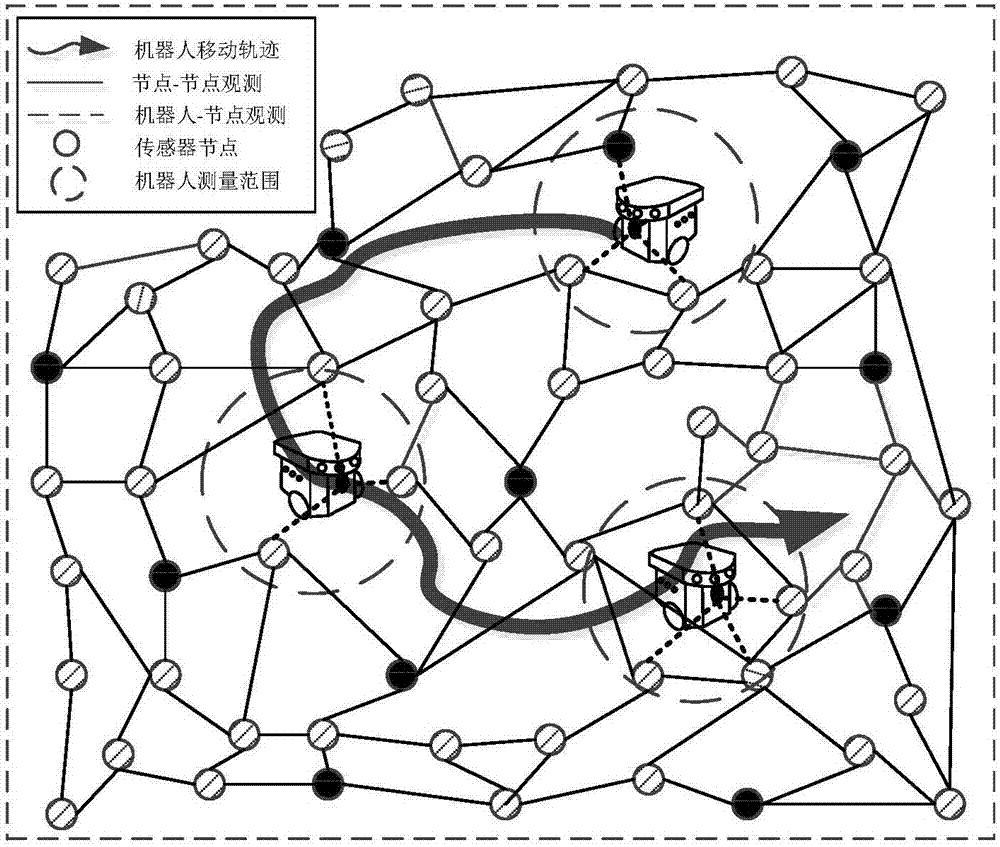
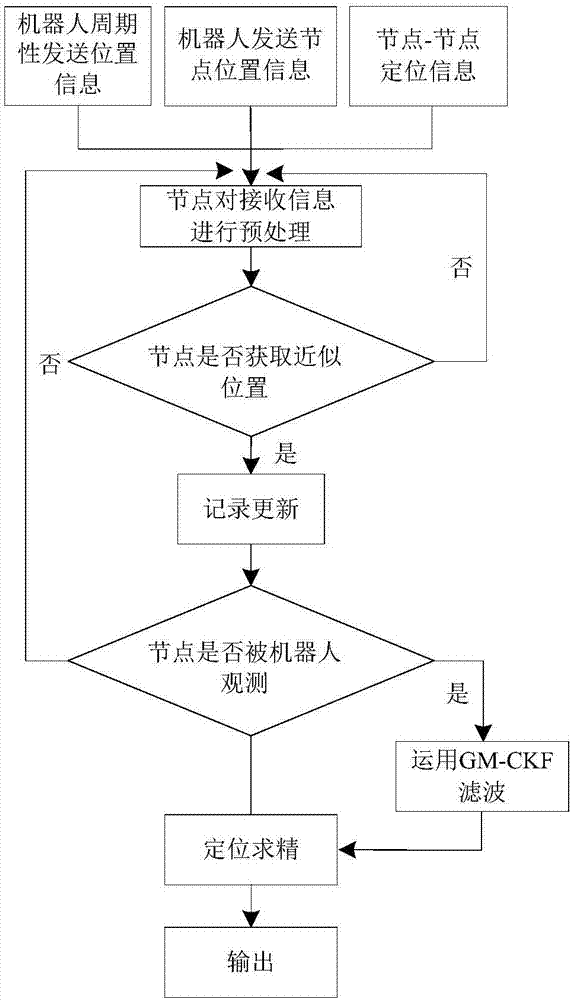
[0030] According to one embodiment of the present invention, as figure 1 Shown, a kind of wireless sensor network node localization method based on mobile robot assistance, described method comprises the following steps:
[0031] Step 1) The node communicates with some known anchor nodes for positioning, and obtains relative reference positioning information;
[0032] Step 2) The mobile robot periodically sends position information during the movement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More