

Carthamus tinctorius precise cohesion harvesting robot based on cooperation of multiple mechanical arms and control method
A robotic arm and robot technology, which is applied in the field of safflower precise cohesion and harvesting robots and control, can solve problems such as plant disturbance, low efficiency of the robotic arm, and inability to adapt to the safflower planting mode.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
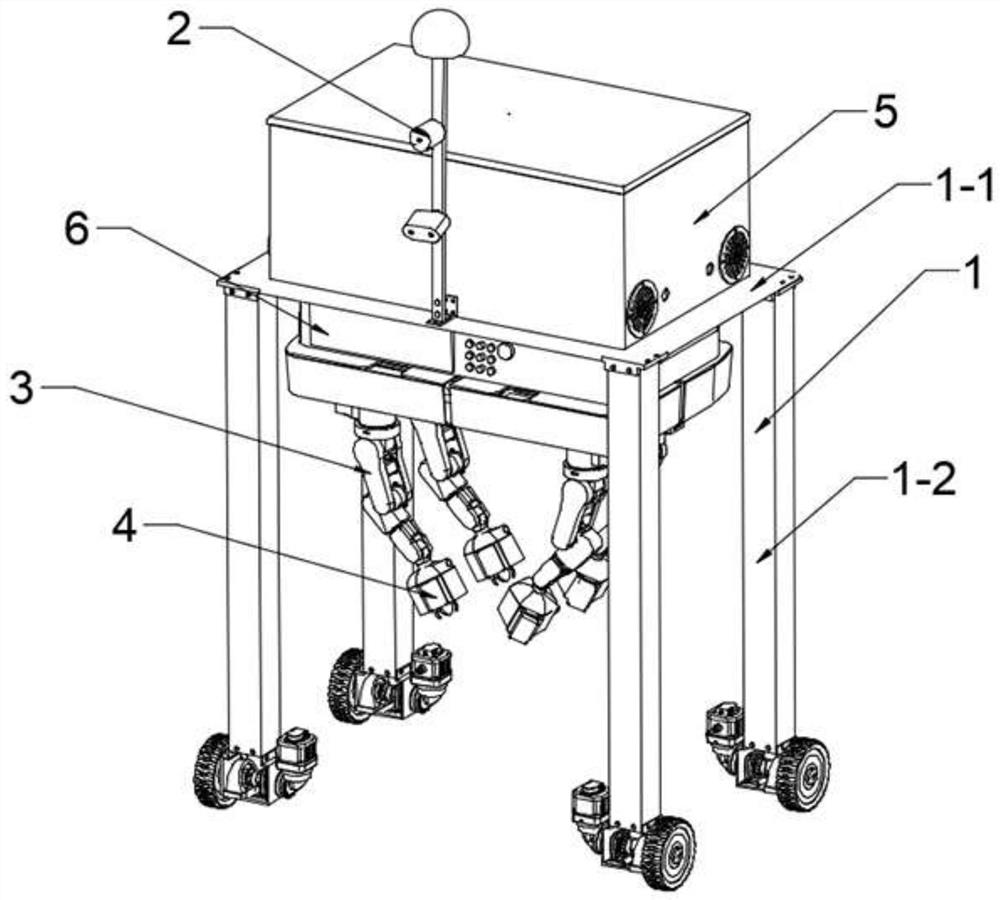
[0126] like figure 1 As shown, a safflower precision cohesion harvesting robot based on multi-manipulator cooperation includes a mobile device 1, a safflower identification and positioning system 2, a robotic arm group 3, a filament harvesting device 4, a filament collection device 5 and an electric control system 6.
[0127] The mobile device 1 includes a mounting plate 1-1, a walking wheel unit 1-2;
[0128] The four groups of walking wheel monomers 1-2 are symmetrically fixed on the four corners of the lower side of the mounting plate 1-1; the lower part of the walking wheel monomer 1-2 is provided with a power wheel group; the harvesting robot can pass through The differential rotation of four groups of walking wheel monomers 1-2 realizes the steering of the harvesting robot.
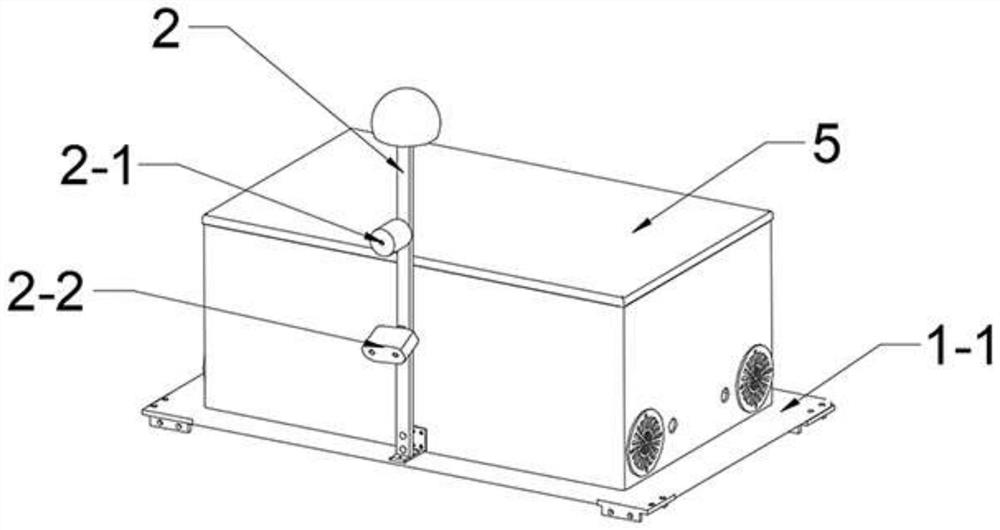
[0129] like figure 2 As shown, the safflower identification and positioning system 2 is fixedly connected to the front end of the upper part of the mobile device 1 through a support rod, and the...
Embodiment 2
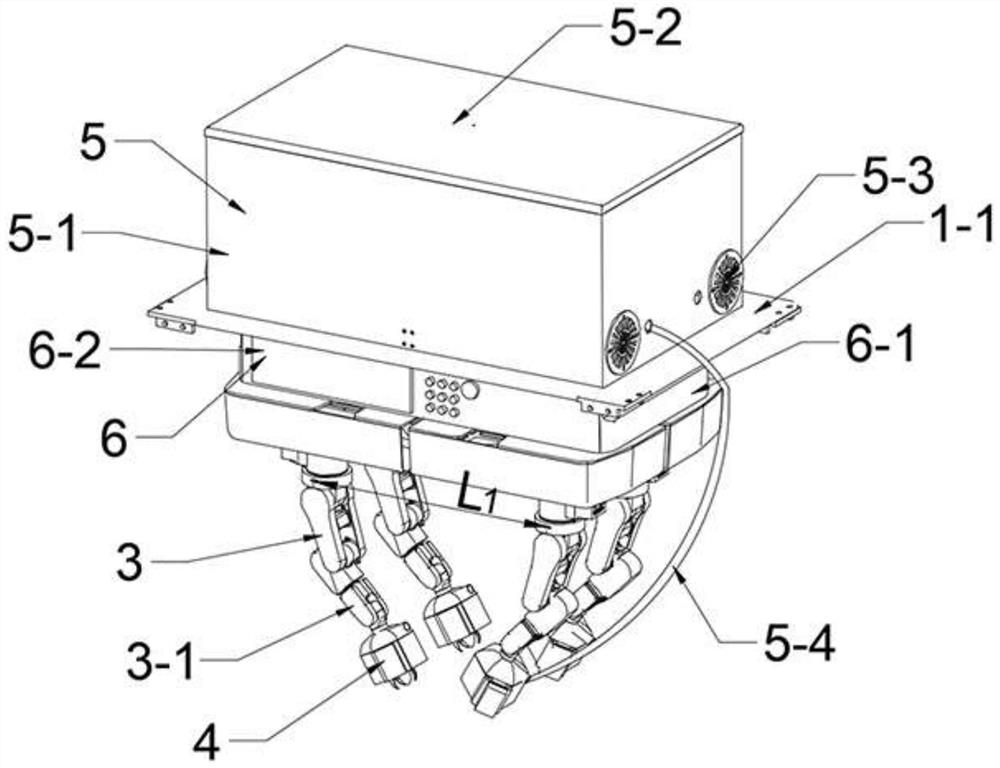
[0166] As a preference, the articulated robotic arm 3-1 uses a six-axis robotic arm with a high degree of freedom, which is suitable for working with multiple trajectories or angles, and can work flexibly within the harvesting range; simplify the distribution range of fruit balls in the safflower planting row is width L and height H 2 The triangular prism model extended by the isosceles triangle, when harvesting the safflower on the two sides of the triangular prism, the fruit balls in the three prism model near the waist of the safflower planting rows on the left and right sides can be harvested at the same time, realizing multi-row harvesting Harvest, improve harvesting efficiency.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More