

Underwater carrier terminal sliding-mode control method based on time delay estimation
A technology of underwater vehicle and terminal sliding mode, which is applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention is further elaborated below in conjunction with accompanying drawing, and following examples are only used to describe the present invention and are not intended to limit the scope of use of the present invention, and various equivalent transformations of the present invention by engineers and technicians in various fields are all included in the scope of rights required by the present invention Inside. The specific implementation steps are as follows:
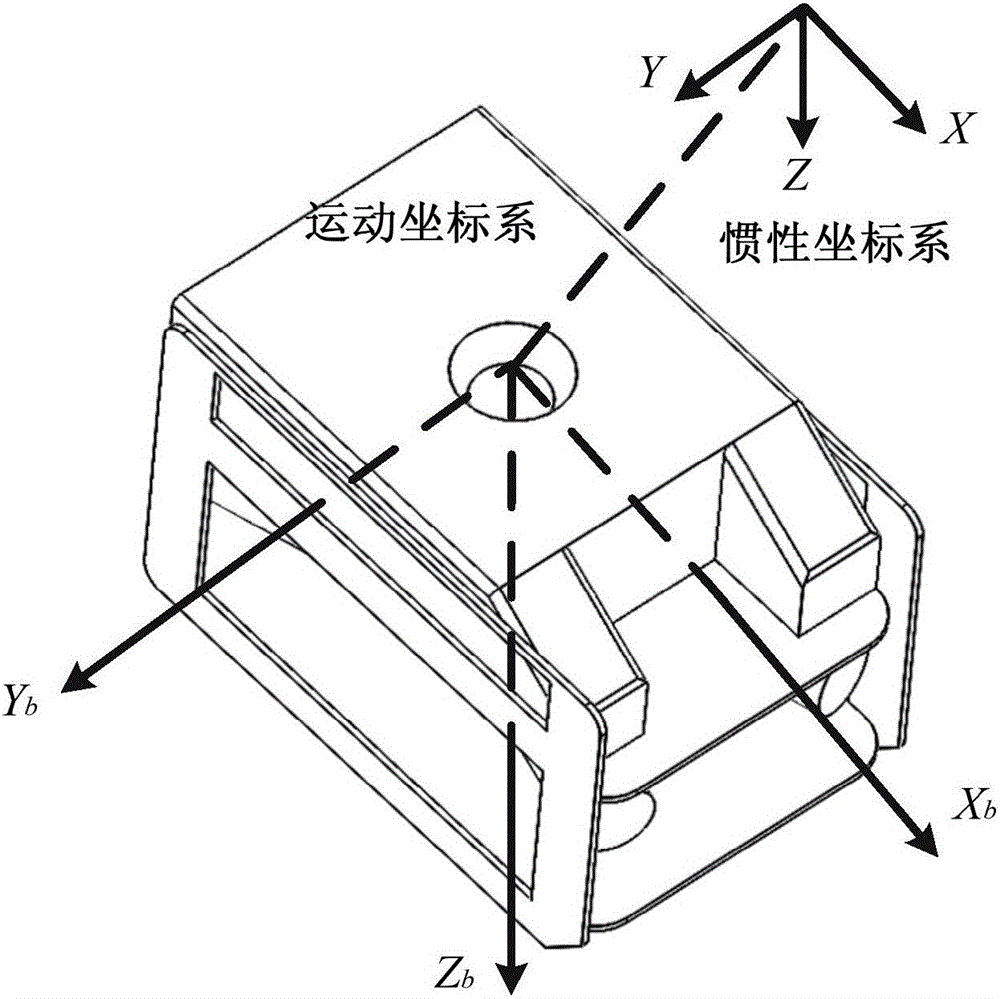
[0043] The invention discloses a terminal sliding mode control method of an underwater vehicle based on time delay estimation, which is used to control a four-degree-of-freedom underwater vehicle, comprising the following steps:
[0044] (1) Establish the kinematic equation of the underwater vehicle:
[0045] η · = J ( η ) v
[0046] where η=[x y zψ] T is the position and ori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More