

A method of robot ranging based on multi-sensor fusion
A robot and distance technology, applied in the direction of instruments, measuring devices, sound wave re-radiation, etc., can solve the problems of complex algorithms and high-performance computing chips, the difficulty in meeting the requirements of accuracy and reliability, and the high price of laser scanning radar, etc., to achieve Good for accuracy and stability, good dynamic performance, and good static performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the drawings and embodiments, and the embodiments of the present disclosure are not necessarily intended to cover all aspects of the present invention. It should be appreciated that the various concepts and embodiments described above, as well as those described in more detail below, can be implemented in any of numerous ways, since the concepts and embodiments disclosed herein are not limited to any implementation. In addition, some aspects of the present disclosure may be used alone or in any suitable combination with other aspects of the present disclosure.
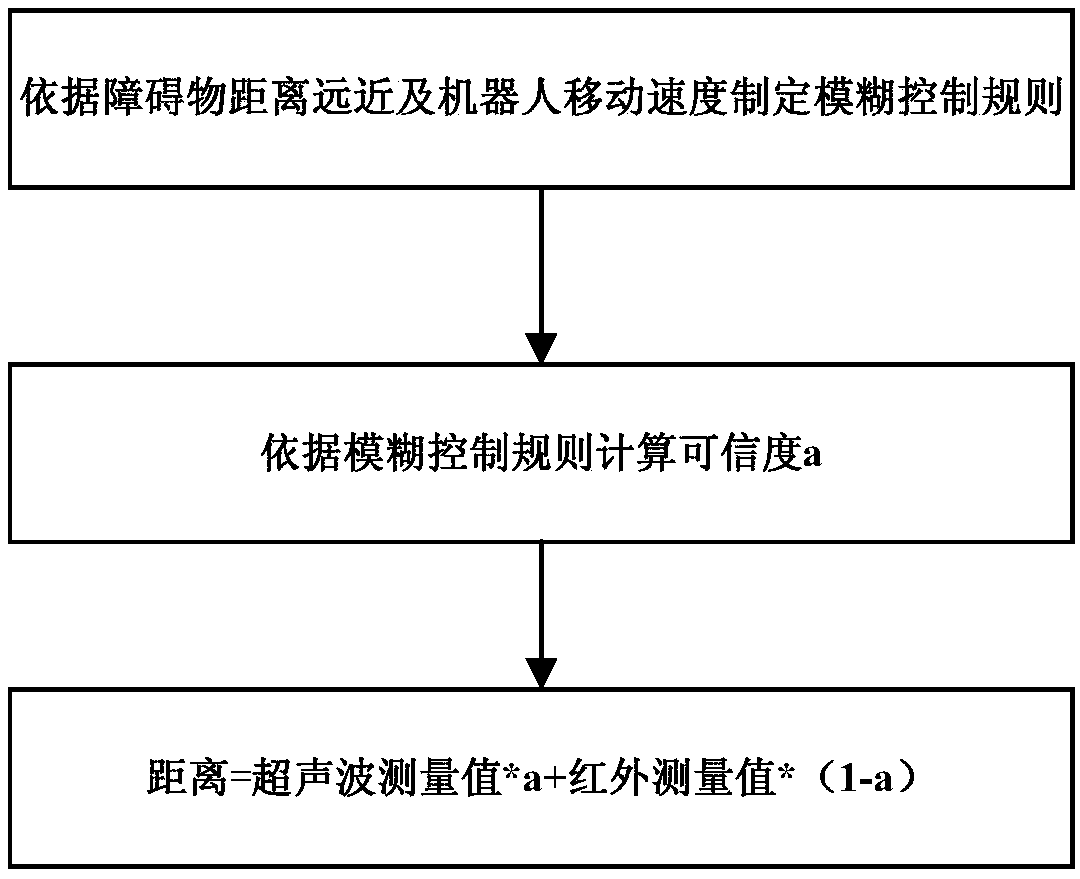
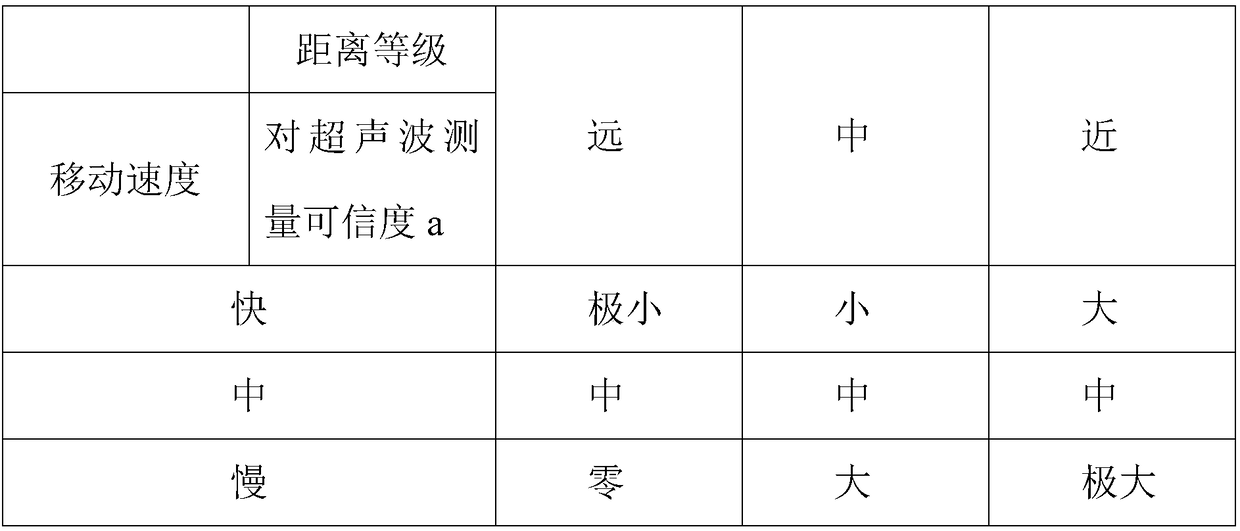
[0020] Such as figure 1 As shown, a robot ranging method based on multi-sensor fusion includes three modules: fuzzy control rule formulation module, credibility calculation module, and distance calculation module. Among them, the fuzzy control rule formulation module is used to determine the fuzzy control rules; the reliability calculati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More