

Unmanned ship dynamic locating control method
A control method and dynamic positioning technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of unmanned dynamic positioning control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings.
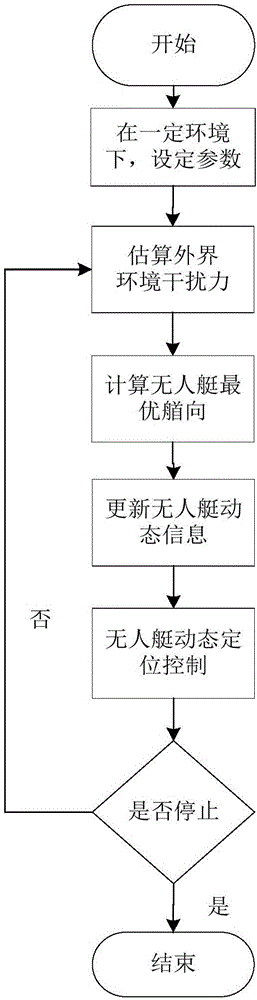
[0033] combine figure 1 and figure 2 , the present invention comprises the following steps:
[0034] Step 1. Set the position parameters of the UAV
[0035] Under certain conditions of the ocean environment, set the position parameters of the unmanned vehicle.
[0036] Step 2. Estimate external environmental forces
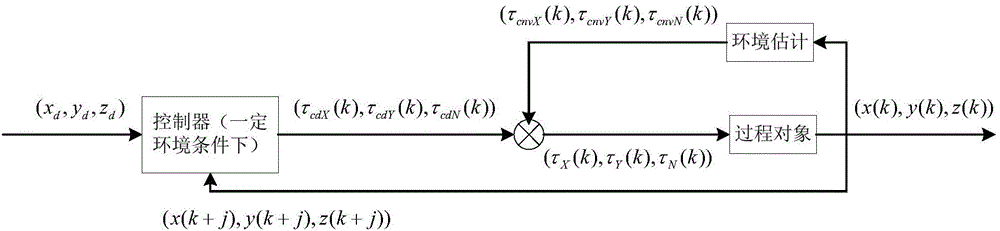
[0037] The real-time external environmental force is calculated by the environmental force estimation method.
[0038] make For the estimated external environment force, the three items in the matrix successively represent the longitudinal force, lateral force and yaw moment of the external environment force on the UAV. The calculation expression of the external environment external force estimation is shown in the following formula:
[0039] τ ^ e n ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More