

Flexible leg structure with plane five-rod mechanism
A five-bar mechanism and flexible leg technology, which is applied in the field of planar five-bar mechanism flexible leg structure, can solve the problems of poor load-carrying capacity of series mechanism, reduced reliability and durability of parts, and joint damage, etc., so as to improve environmental adaptability, The effect of fast motion response and good kinematic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiment is a specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes, but it is not used as a limitation to the scope of protection of the claims of the present application.
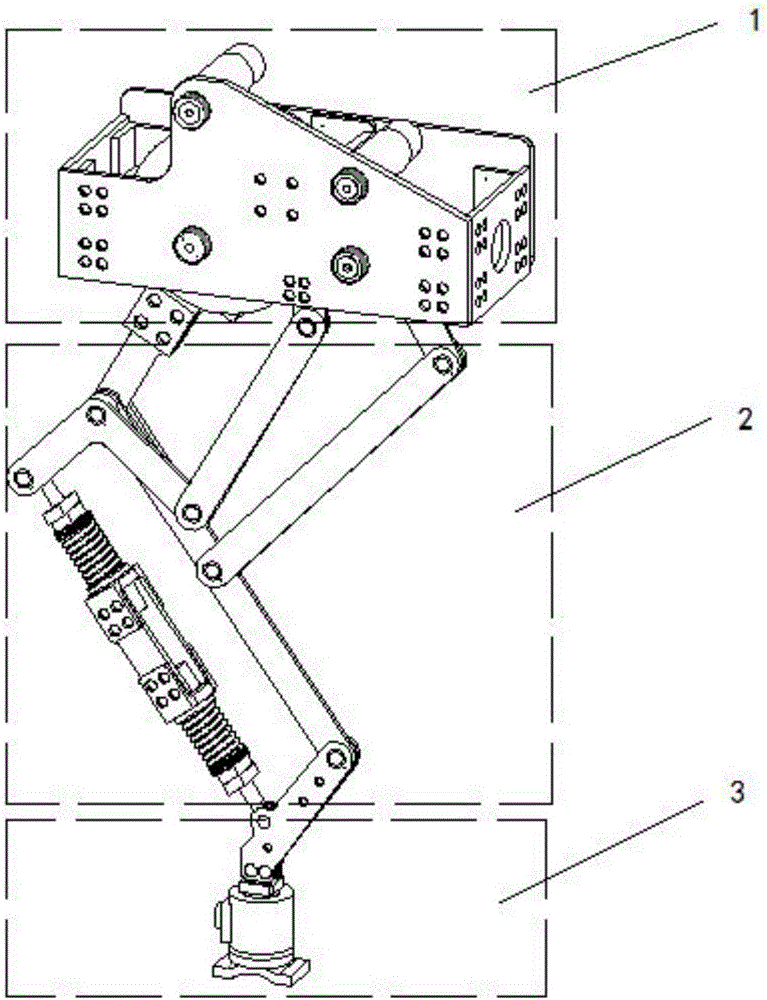
[0025] The flexible leg structure of the planar five-bar mechanism designed by the present invention (be called for short leg structure, refer to Figure 1-8 ) includes three large modules (three major parts): pitch drive joint module (referred to as pitch motion joint) 1, link structure module (referred to as link structure) 2 and toe module (referred to as toe) 3; pitch motion joint module 1 above the linkage module 2 and the toe module 3 below the linkage (see figure 1 );
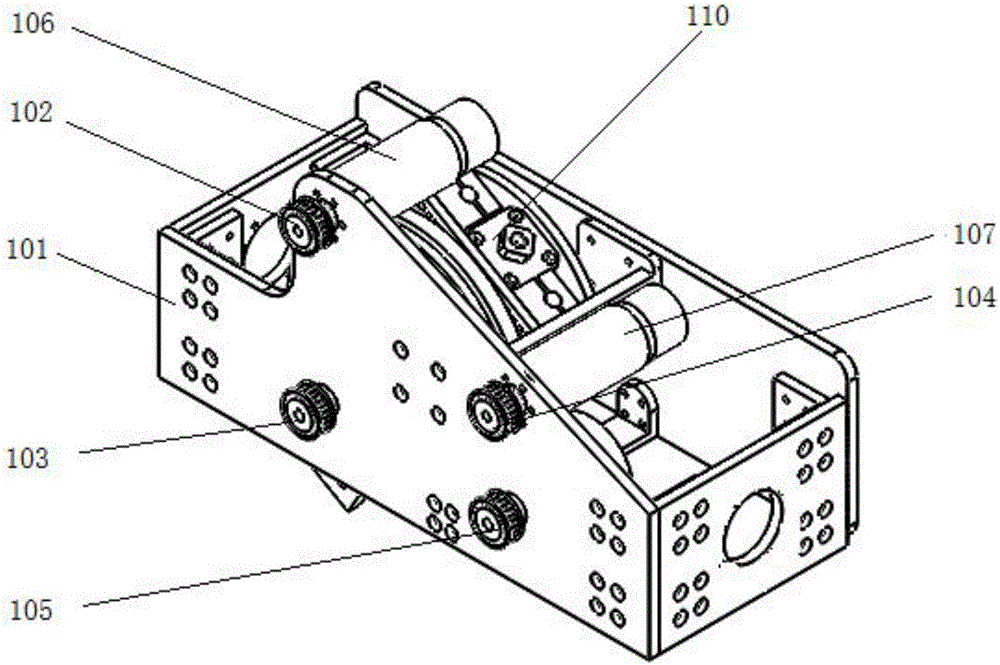
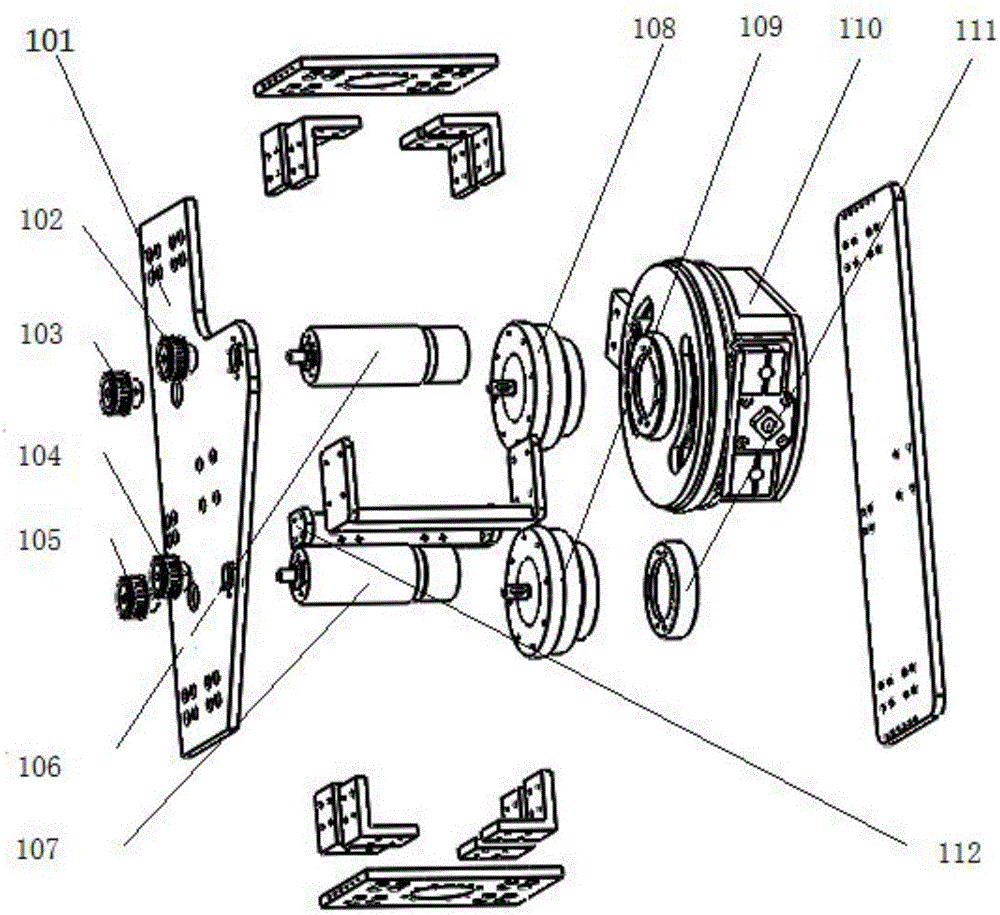
[0026] The pitch drive joint 1 (see figure 2 , image 3) includes joint support 101, No. 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More