

Myoelectric prosthesis gesture and force control method
A control method and prosthetic technology, applied in the field of myoelectric prosthetics, can solve the problems of relatively few studies on synchronous control of single-finger posture and fingertip strength, and achieve the effect of improving proprioception and life convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
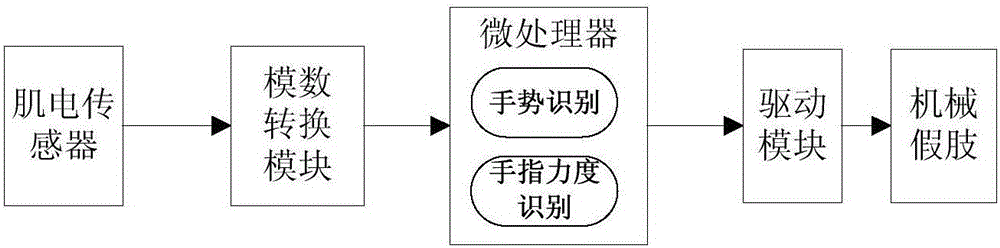
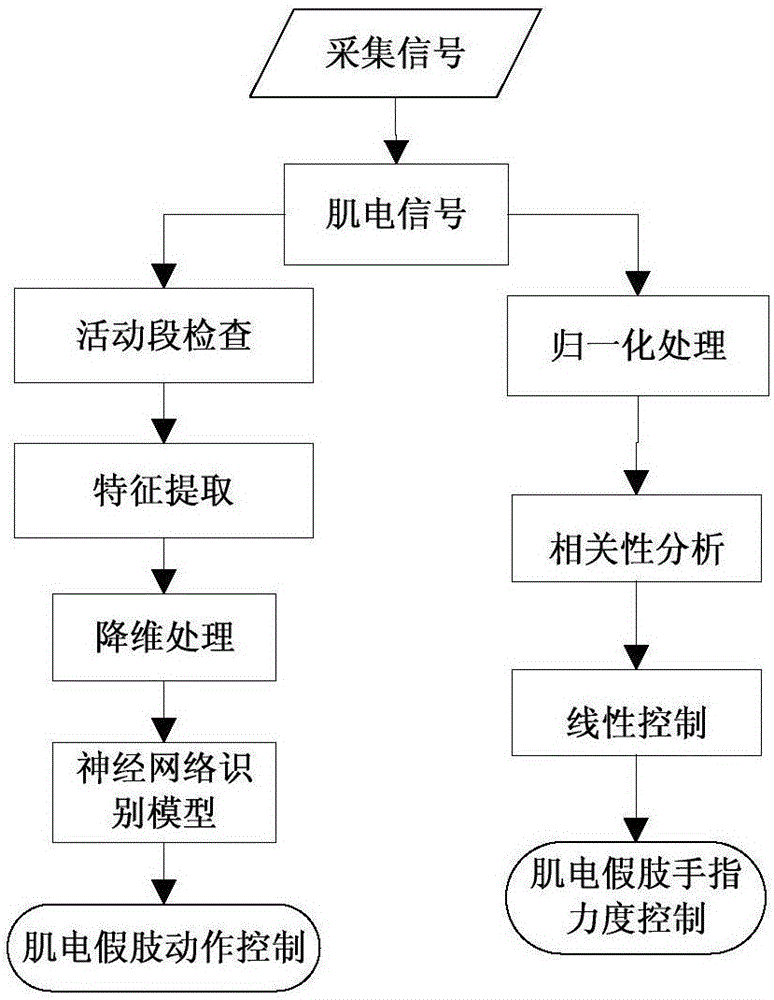
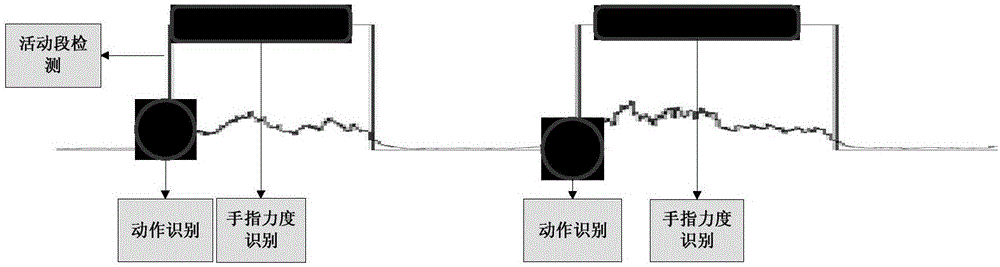
[0022] figure 1 It is a block diagram of the myoelectric prosthesis control system of the present invention. figure 2 It is the flow chart of myoelectric prosthesis gesture and strength control of the present invention, as shown in the figure, the myoelectric prosthesis gesture and strength control method provided by the present invention includes the following steps: collecting forearm surface electromyography signals; multi-channel surface electromyography signals Respectively transmitted to the gesture recognition model and the finger strength recognition model; in the gesture recognition model, the signal activity segment is detected first; the feature information of the bio-myoelectric signal is extracted; the feature information is subjected to data dimensionality reduction processing; Action recognition classification, in which the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More