

A four-degree-of-freedom high-speed parallel robot mechanism
A robot and degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unfavorable mechanism dynamic response characteristics and easy vibration, so as to improve stiffness and dynamic response characteristics, realize acceleration and clear movement mode Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
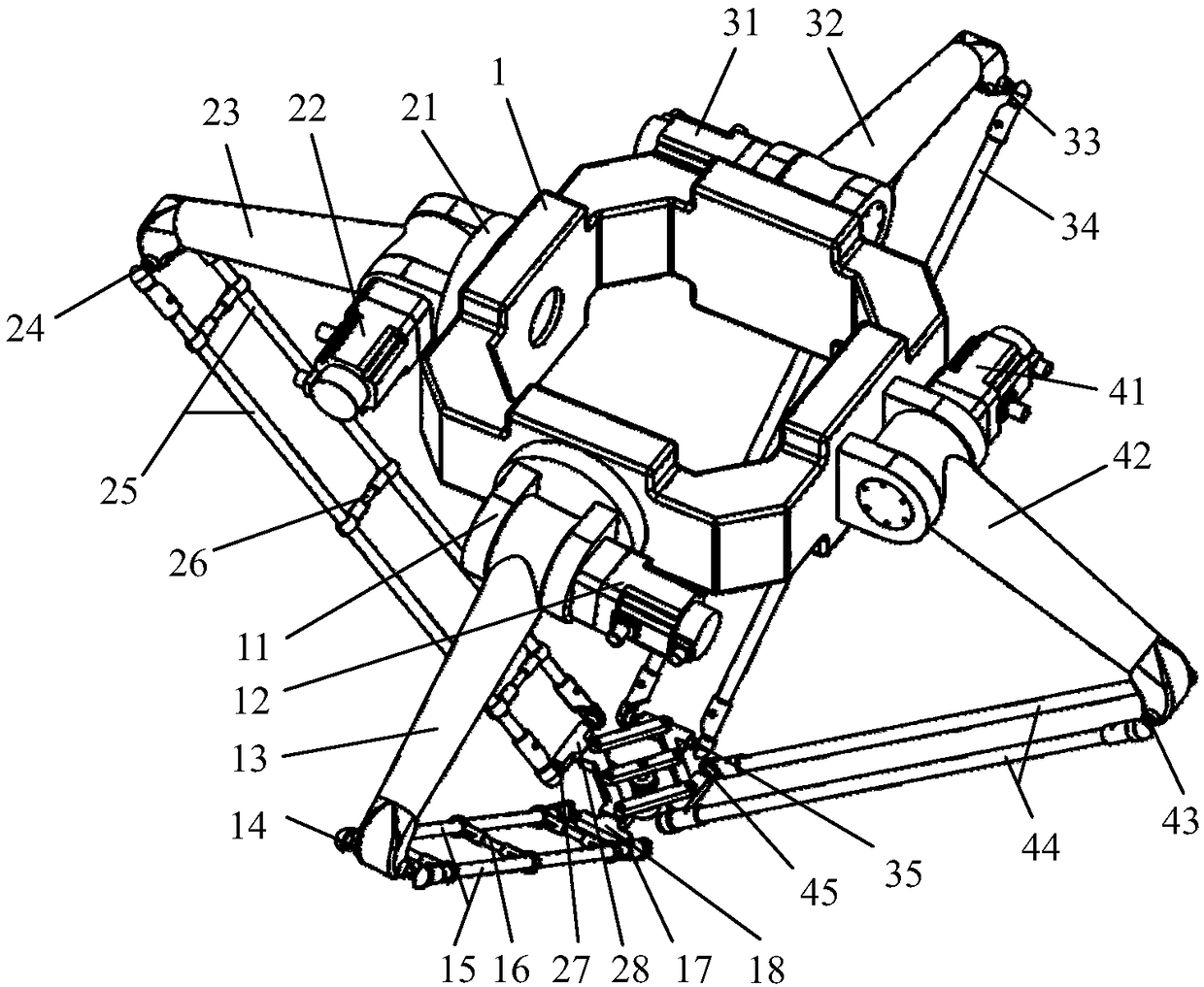
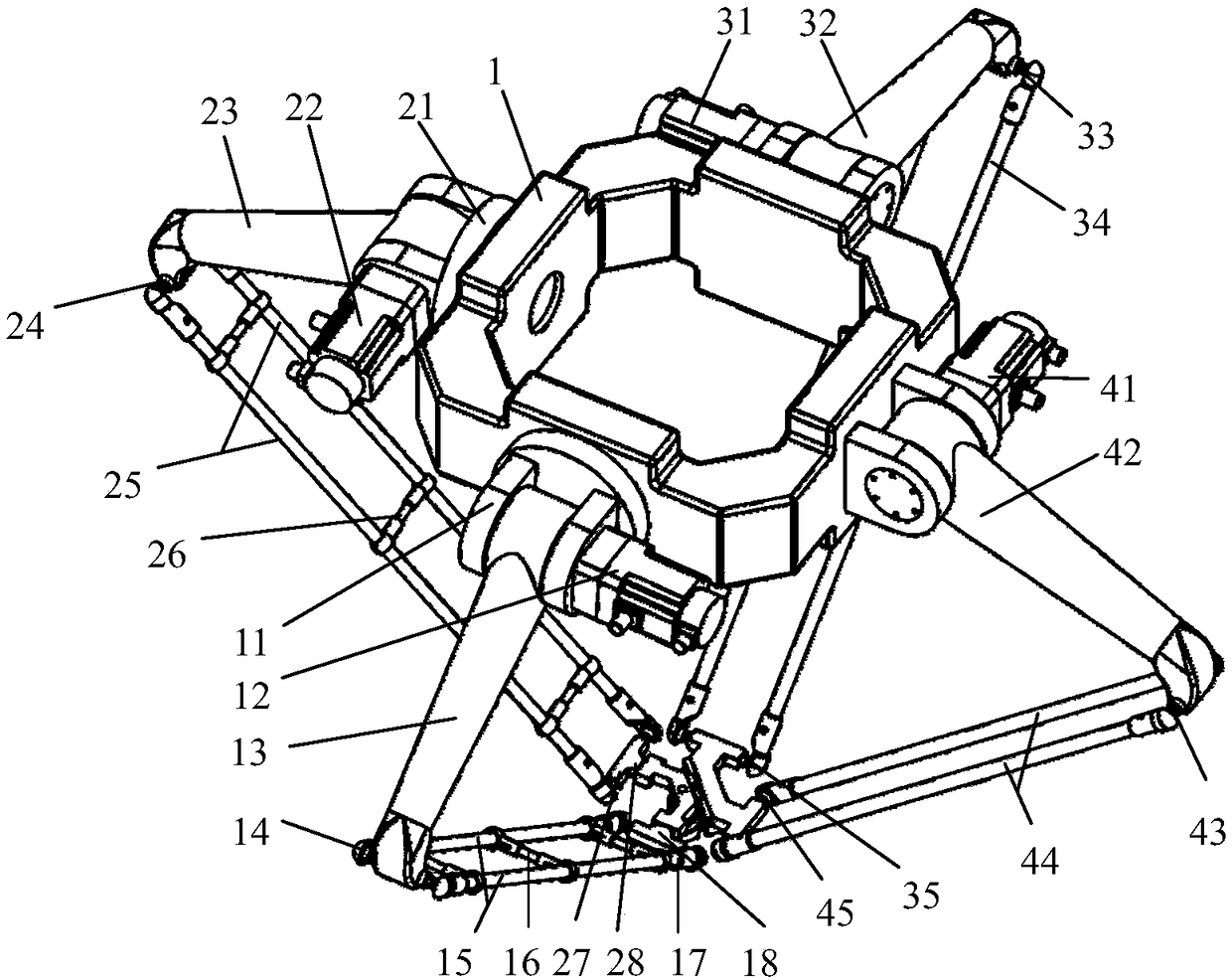
[0024] combined with Figure 1-2 , a four-degree-of-freedom high-speed parallel robot mechanism, including a fixed frame 1, a moving platform, and a first branch chain, a second branch chain, a third branch chain, and a fourth branch chain arranged between the fixed frame 1 and the moving platform, The first branch and the second branch have the same structure, and the third branch and the fourth branch have the same structure;
[0025] The first branch chain includes a first rotating fork 11, a first driving device 12, a first near-frame rod 13, a first upper connecting shaft 14, two parallel and equal-length first far-frame rods 15, a first support Rod 16, the first lower connecting shaft 17 and the first rotating shaft 18; the first rotating fork 11 is rotationally connected with the fixed frame 1, the first driving device 12 is fixedly connected with the first rotating fork 11, and the first One end of the near frame rod 13 is rotationally connected with the first rotatin...
Embodiment 2
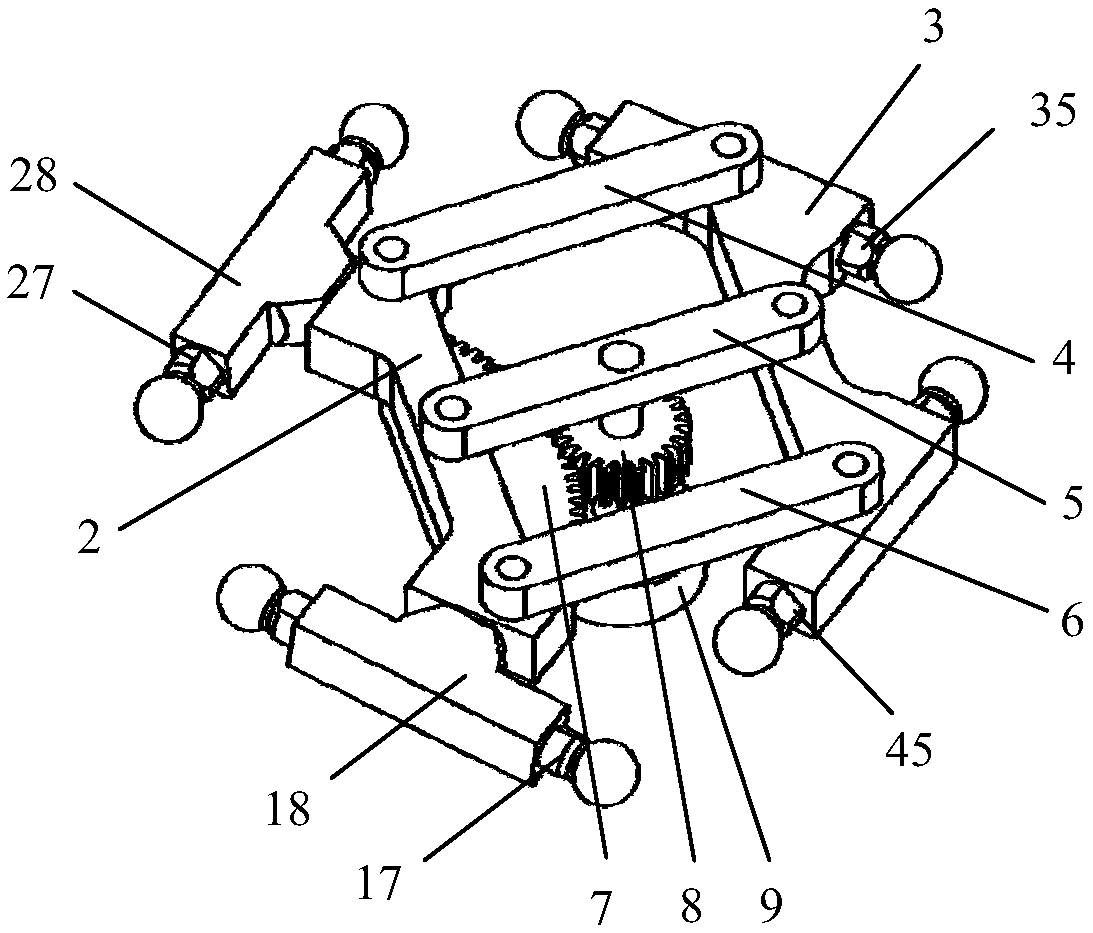
[0033] combined with Figure 3-4 , this embodiment is similar to Embodiment 1, the only difference is that the main platform 2 and the auxiliary platform 3 are connected by guide rail sliders, the main platform 2 is fixedly connected with a slider 102, and the auxiliary platform 3 is fixed A guide rail 101 is connected, and the guide rail 101 and the slider 102 form a guide rail slider pair; the main platform 2 is rotatably connected with a pinion 8-1, and the auxiliary platform 3 is fixedly connected with a rack 10, and the small gear The gear 8-1 meshes with the rack 10; the lower end of the pinion 8-1 is fixedly connected with an end effector 9.
Embodiment 3
[0035] combined with Figure 1-2 , this embodiment is similar to Embodiment 1, the rotation axis of the third near-frame rod 32 and the fixed frame 1 , the fourth near-frame rod 42 and the rotation axis of the fixed frame 1 are perpendicular to each other. The third lower connecting shaft 35 and the fourth lower connecting shaft 45 are perpendicular to each other. A pinion 8 is arranged on the second connecting rod 5 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More