

Feedforward torque compensating method used for industrial robot
A technology of industrial robots and compensation methods, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of large trajectory tracking error, slow response speed of the robot, and insufficient positioning accuracy, so as to reduce the following error and reduce the trajectory tracking error. , Improve the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The purpose of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following examples.
[0034] A method for feedforward torque compensation of an industrial robot, comprising the steps of:
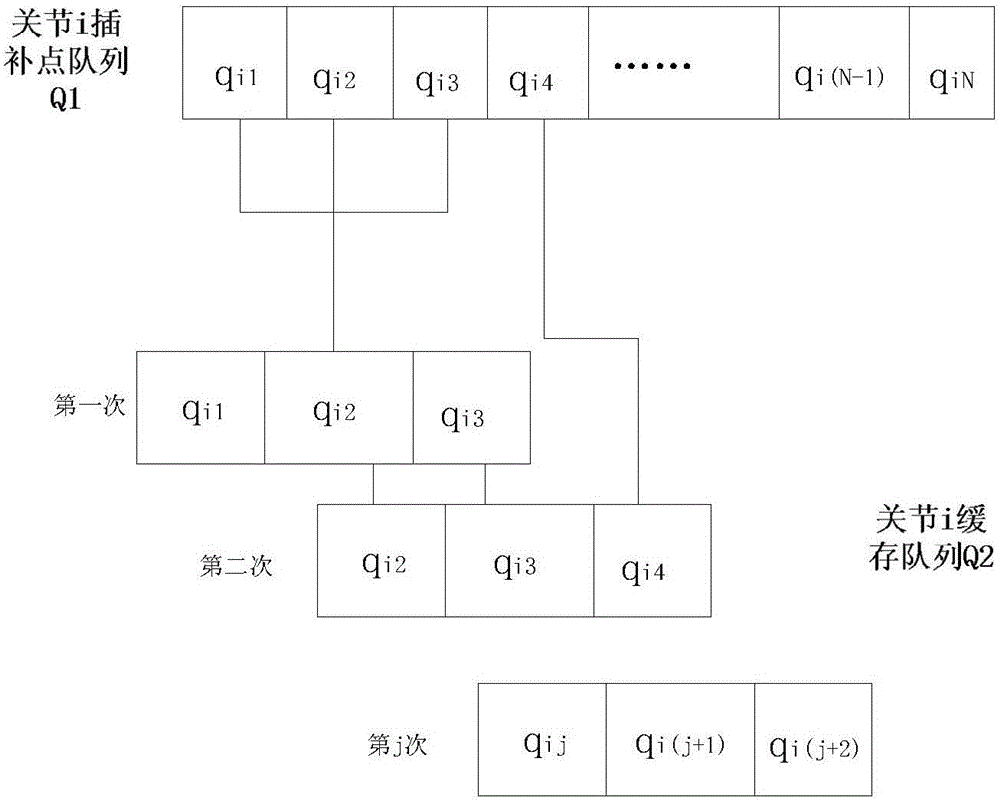
[0035] (1) According to the interpolation point queue after the interpolation operation of each motor, a cache queue is established, and the theoretical joint angular velocity and joint angular acceleration corresponding to each motor of each interpolation point are calculated by the method of central difference;
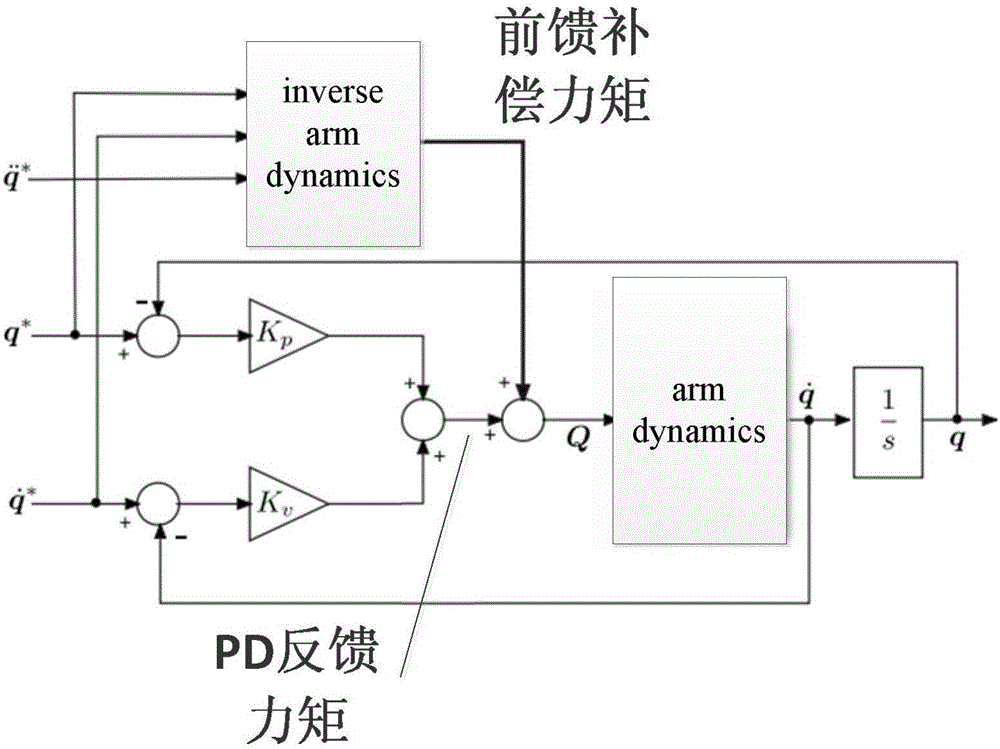
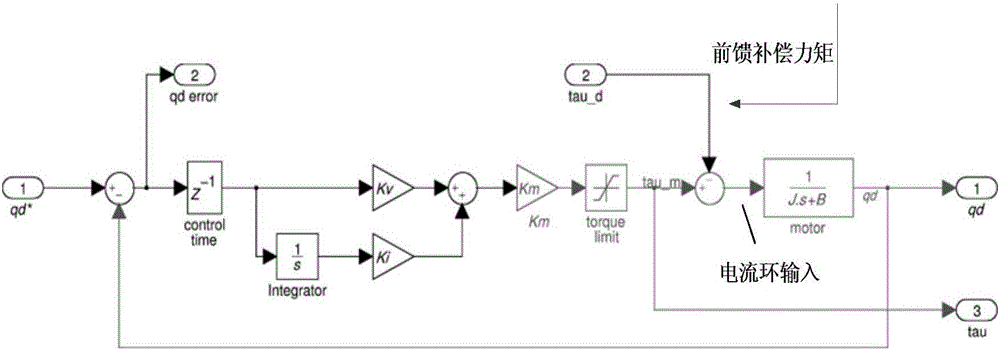
[0036] (2) Using the Lagrangian equation, calculate the feed-forward compensation torque τ of each joint in each interpolation period according to the expected rotation angle, angular velocity, angular acceleration of each joint in each interpolation period and the dynamic model of the robot feedforwwa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More