

A speed detection method and system for an AC servo motor
An AC servo motor, speed detection technology, applied in the direction of AC motor control, control system, motor control, etc., can solve the problem of motor speed dynamic characteristic disturbance torque suppression ability, increase the motor speed detection period, affect the stability of the servo system and other problems to achieve the effect of improving the detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0082] Example 1, such as Figure 4 As shown, assuming that the sliding parameter x is 3, the value of the motor rotation position is △θ(2), △θ(3), ..., △θ(k), then when the detection times k minus 1 is less than or equal to the sliding parameter When x, that is, when k-1<=3:
[0083] a. When the detection times k is 2, k-1=1,
[0084] b. When the detection times k is 3, k-1=2,
[0085] c. When the detection times k is 4, k-1=3,
[0086] When the number of detections k-1 is greater than the sliding parameter x, that is, when k-1>3:
[0087] d. When the number of detections is 5, k-1>3,
[0088] e. When the number of detections is k, k-1>3,
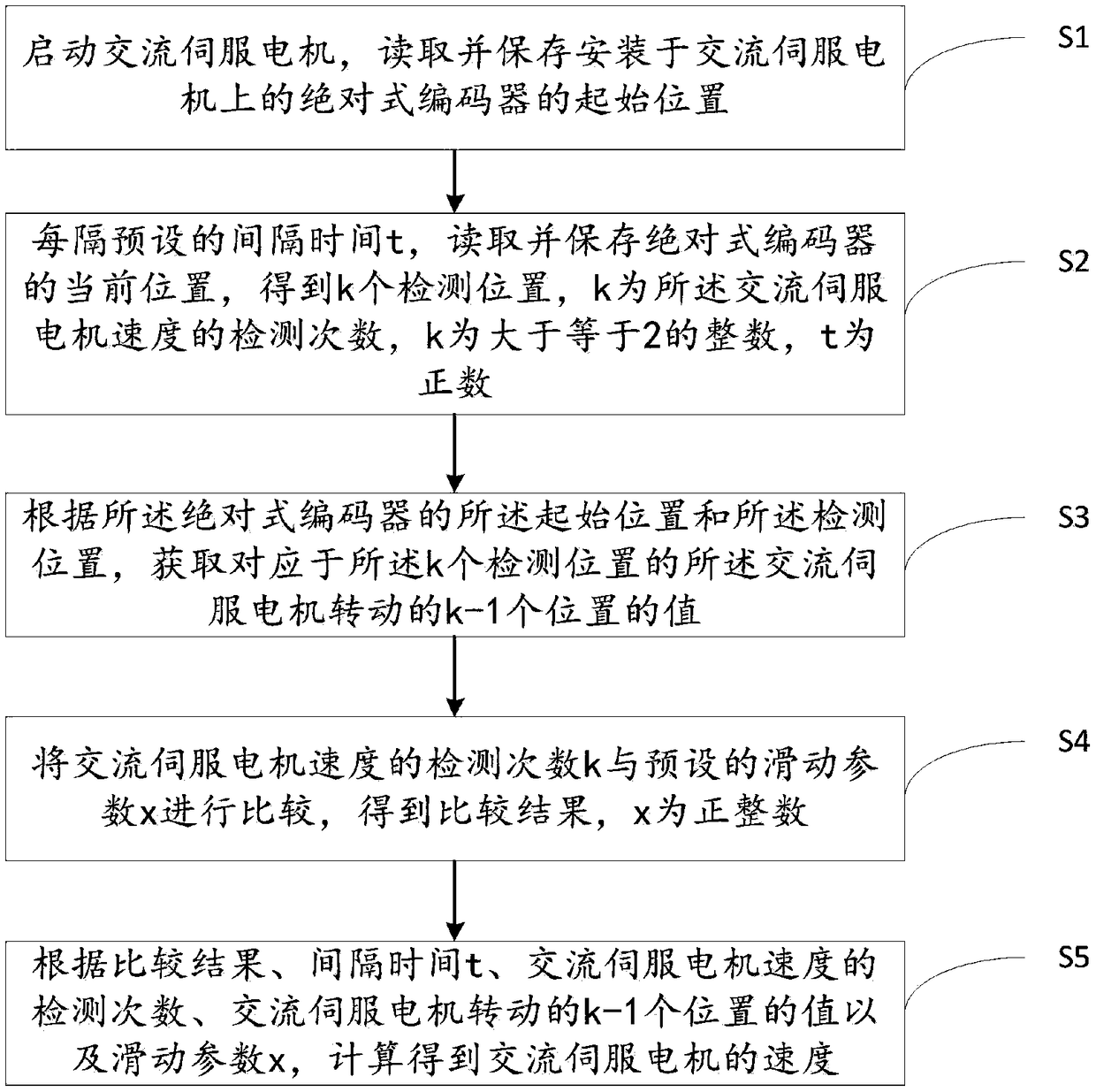
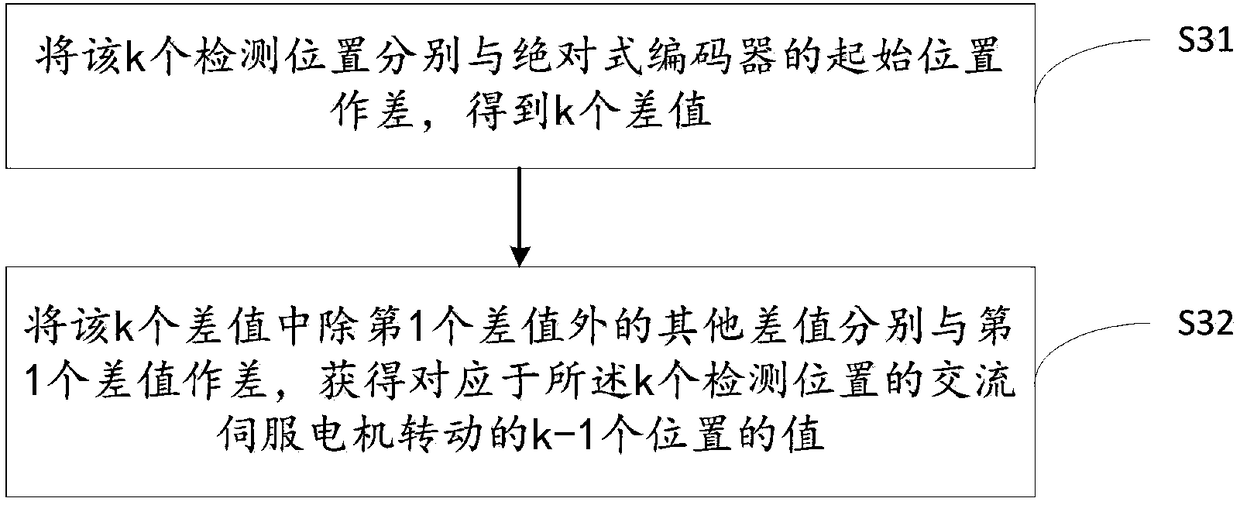
[0089] Such as Figure 5 As shown, a speed detection system of an AC servo motor, the speed detection system includes:
[0090] The first reading module 1 is used to start the AC servo motor, read and save the initial position of the absolute encoder installed on the AC servo motor;
[0091] The second reading module 2 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More