

Device and method for identifying kinetic parameters of terminal loads of six-degree-of-freedom robot
A technology of dynamic parameters and identification methods, applied in the field of dynamic parameter identification of end loads, can solve problems such as poor software and hardware compatibility, unsatisfactory identification results, and improper algorithm selection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
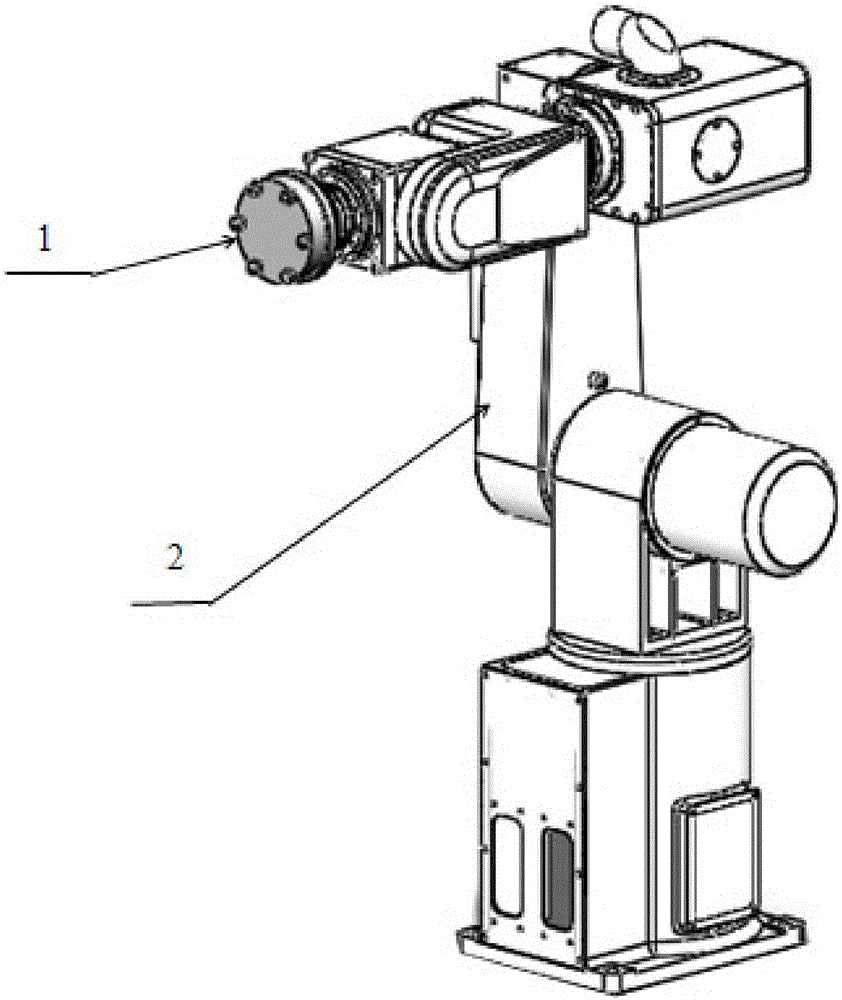
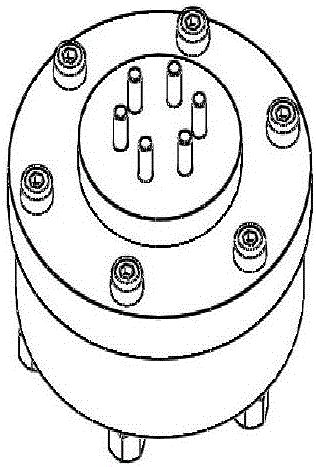
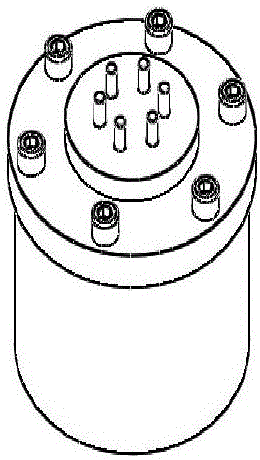
[0085] Such as Figure 1 to Figure 3 As shown, a device for identifying dynamic parameters of a six-degree-of-freedom robot terminal load includes a six-axis industrial robot 2, a number of loads 1 of different qualities that can be alternatively arranged at the end of the six-axis industrial robot, and a real-time control system. The real-time control system is used to implement millisecond-level real-time motion data collection for the robot.
[0086] Specifically, the collected real-time motion data includes encoder values and torque values.
[0087] Specifically, the material of the load is steel.
[0088] In this embodiment, a series of loads 1 with different configurations are designed by using three-dimensional design and drawing software, and the mass can be designed by oneself. In this experiment, the first load and the second load are designed; steel materials are used for self-designed loads, and they are processed.
Embodiment 2
[0090] Such as Figure 4 As shown, a method for identifying dynamic parameters of a six-degree-of-freedom robot end load based on the device includes steps:
[0091] (1) Establish a kinetic model according to the Lagrangian equation;
[0092] (2) Design the incentive trajectory;
[0093] (3) Implement millisecond-level real-time data collection for the robot through the real-time control system, and average multiple sampling data and improve the signal-to-noise ratio with the central difference method; the amount of collected data can be expanded, which not only ensures sufficient sampling data, but also provides The identification of the kinetic parameters of the end load provides the data basis.
[0094] (4) Identification of load parameters, substituting the parameters into the built dynamic model, and then estimating the dynamic parameters to be identified;
[0095] (5) Model verification. Using the identified load dynamic parameters to calculate the theoretical value o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More