

Control method based on underwater floating and sinking device
A control method and water bladder technology, which are applied in the directions of underwater ships, underwater operation equipment, transportation and packaging, etc., can solve the problems of inability to achieve suspension motion, inaccurate depth control, etc., and achieve stable depth, good flexibility, Responsive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
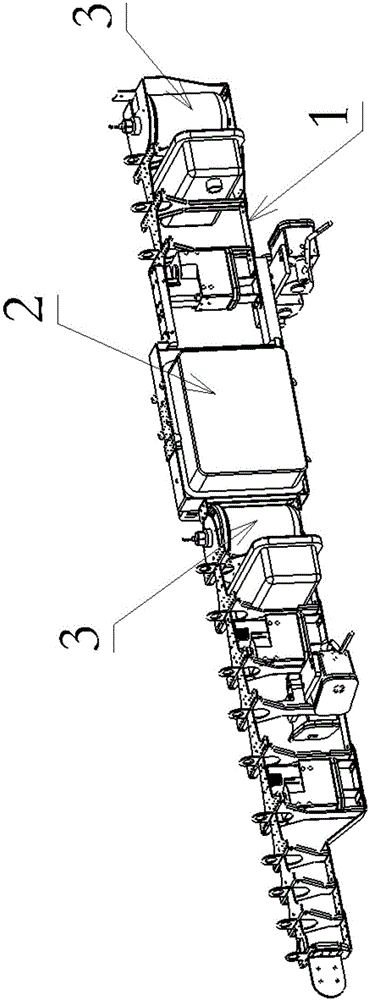
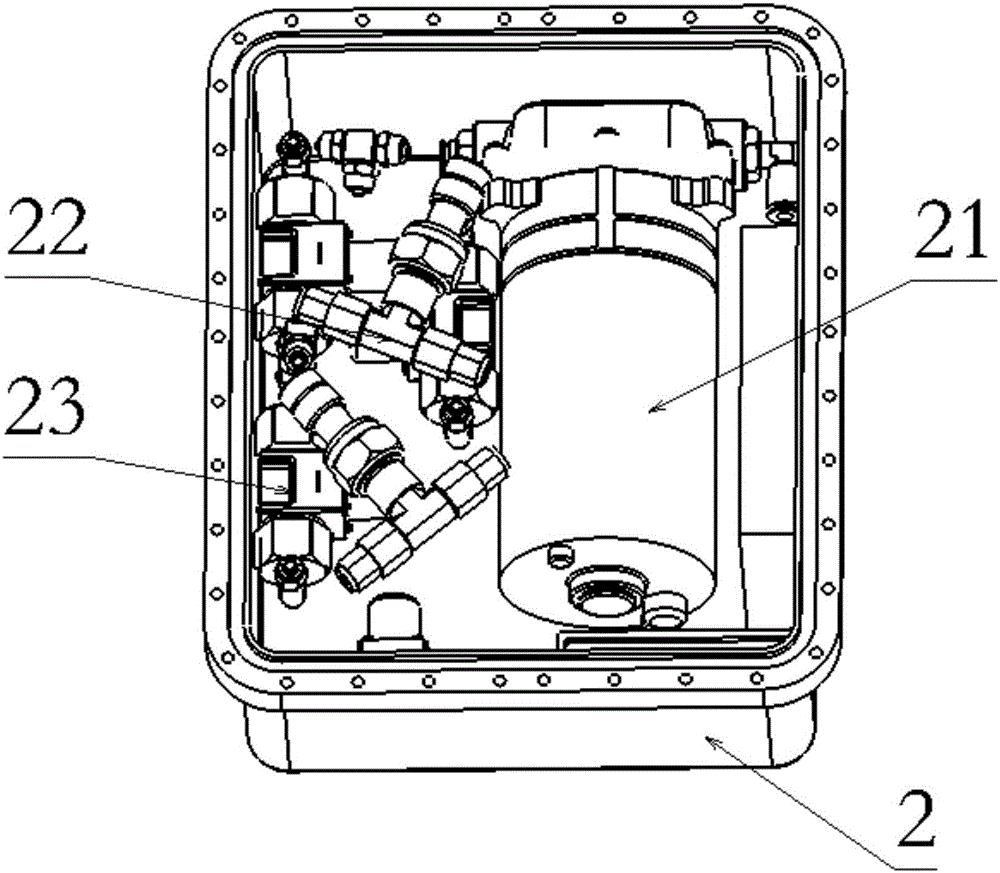
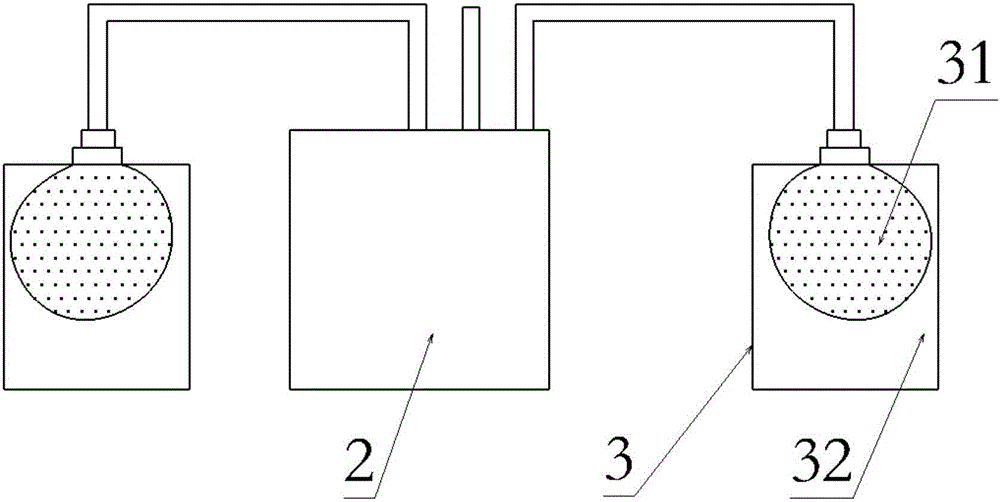
[0034] refer to Figure 1-6 As shown, a control method based on underwater floating and sinking devices, such as figure 1 As shown, it includes a sinking controller, a water pump box 2, and a pressure tank 3. The water pump box 2 is provided with a water pump 21 and a valve body 23; Gas 32 is sealed between the water bag 31 and the pressure tank 3; the water pump 21, the valve body 23 are connected with the ups and downs controller; the water pump 21 and the water bag 31 are connected by pipelines; There is a valve body 23; as figure 2 As shown, the ups and downs controller is installed in the water pump box 2; the ups and downs controller controls the water intake of the water pump 21 and the switch of the valve body 23.
[0035] Preferably, the valve body 23 is an electromagnetic check valve.
[0036] Preferably, the number of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More