

Intelligent grabbing manipulator for automotive green tires
A technology for grabbing manipulators and automobile tires, which is applied to conveyor objects, transportation and packaging, etc. It can solve problems such as operational errors, easy damage to tire embryos, low output, etc., and achieve the effect of improving service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
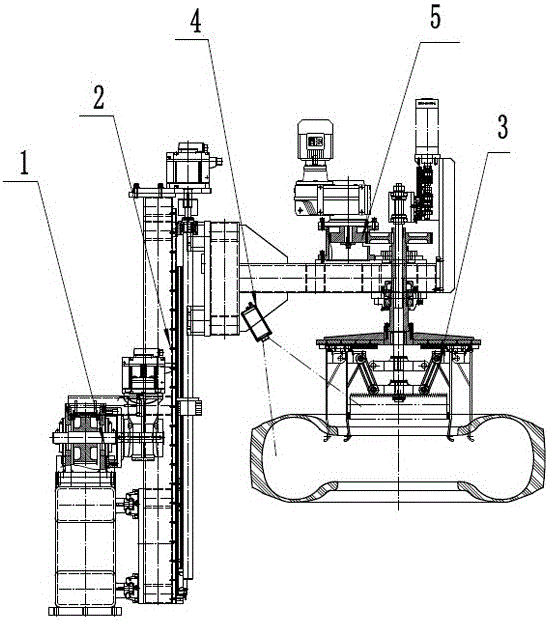
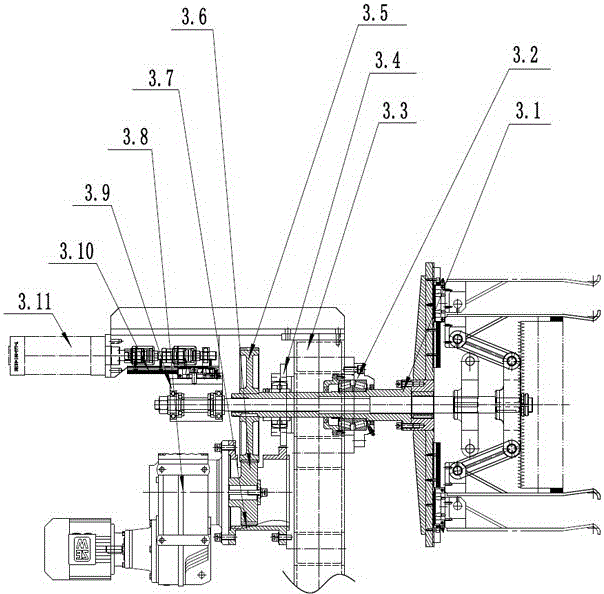
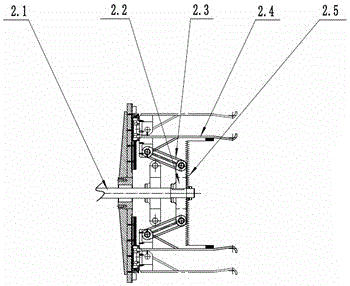
[0026] see Figure 1~4 , the invention relates to an intelligent grabbing manipulator for automobile tire blanks, which includes a manipulator jaw expansion and contraction mechanism 3 and a manipulator rotation and positioning mechanism 5, and the manipulator jaw expansion and contraction mechanism 3 includes a moving inner shaft 2.1, which moves The inner shaft 2.1 passes through a flange 2.6, and one end of the moving inner shaft 2.1 is fixedly connected with a connecting rod support frame 2.2, and the flange 2.6 is provided with a plurality of linear guide rail pairs 2.7 along its radial direction, and claws 2.4 is fixedly connected to the slider of the first linear guide rail pair 2.7, one end of the connecting rod 2.3 is hinged with the connecting rod support frame 2.2, and the other end is hinged with the claw 2.4 or the slider on the first linear guide rail pair 2.7, and the dust cover 2.5 is set on the moving inner shaft 2.1, and the edge of the dust cover 2.5 is fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More