A kind of somatosensory control fire robot, control system and control method
A fire-fighting robot and somatosensory control technology, which is applied in fire rescue and other fields, can solve problems such as loss of movement ability and inability of robots to cope with emergencies, and achieve the effects of ensuring efficient use, strong market value, and realizing remote control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0028] Such as Figure 1~Figure 4 The schematic diagram of the structure is shown.
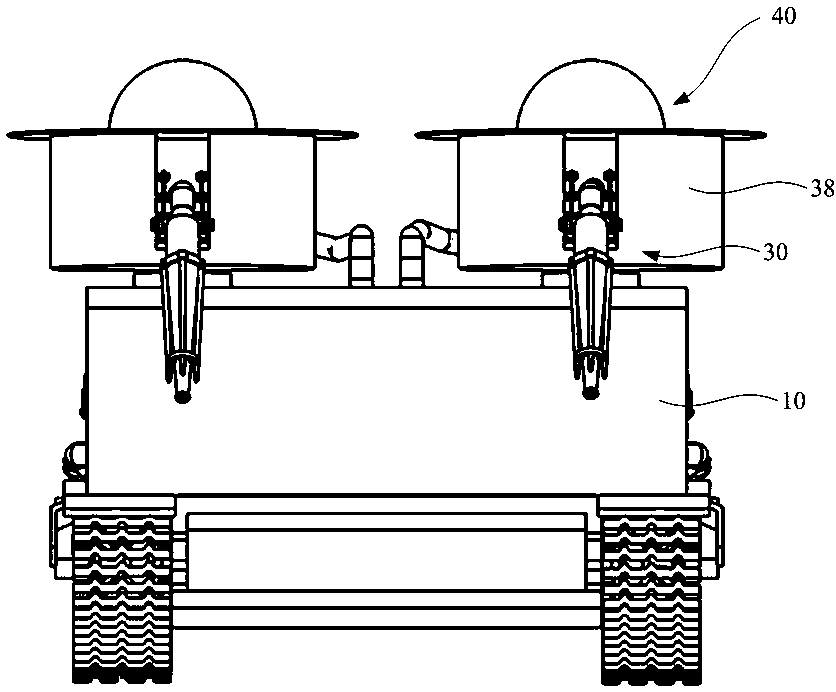
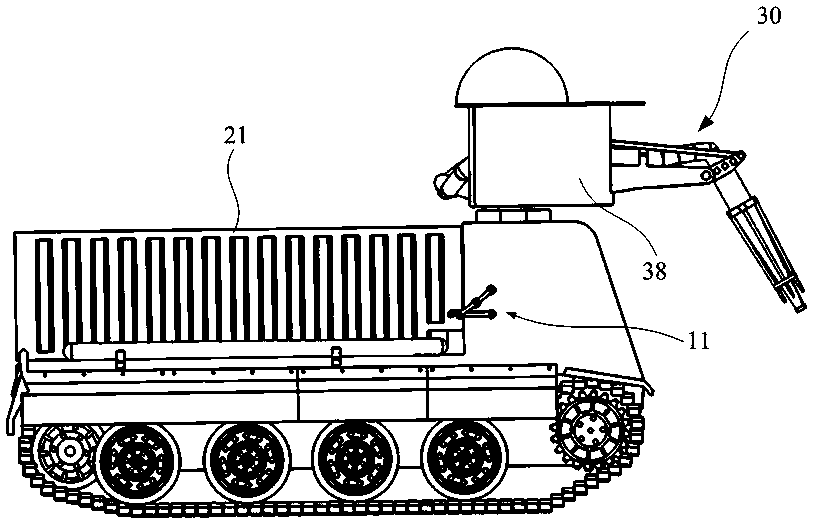
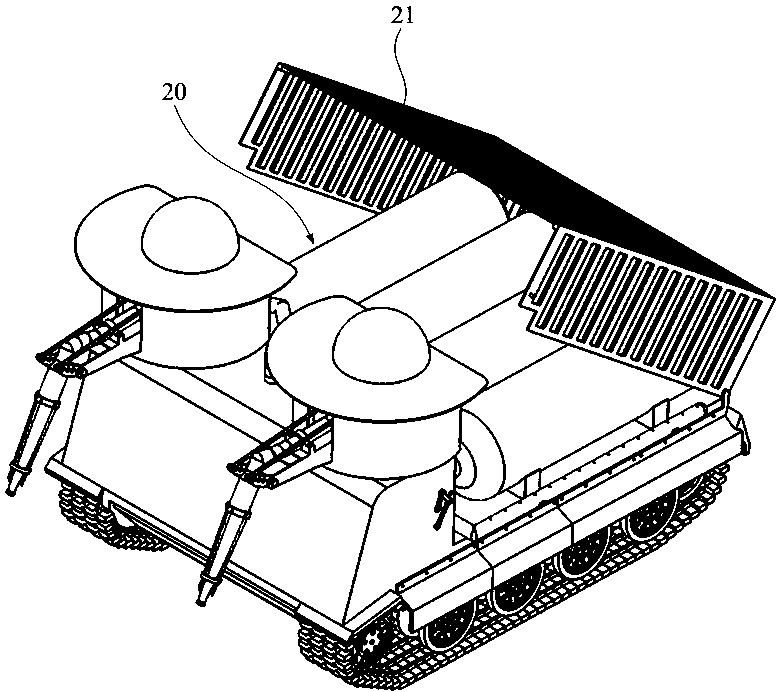
[0029] The embodiment of the present invention provides a somatosensory control fire-fighting robot including a crawler-type mobile platform 10 , several storage tanks 20 detachably mounted on the crawler-type mobile platform 10 , and a manipulator 30 .
[0030] The crawler-type mobile platform 10 is composed of a carrying platform and crawlers. In this embodiment, there are two manipulators 30 arranged on the front end of the crawler-type mobile platform 10 . The degrees of freedom of the manipulators 30 are 2.
[0031] refer to Figure 5 The schematic diagram of the structure is shown.
[0032] The manipulator 30 includes a support arm 31 , and a spray gun 32 is rotated on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More