

Underwater bionic propelling device with controllable rigidity
A propulsion device and stiffness technology, applied in the field of bionic robots, can solve the problems of limited propulsion performance improvement, change of stiffness, difficulty in swimming performance, etc., and achieve the effects of improving propulsion performance, enhancing adaptability, and excellent propulsion performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
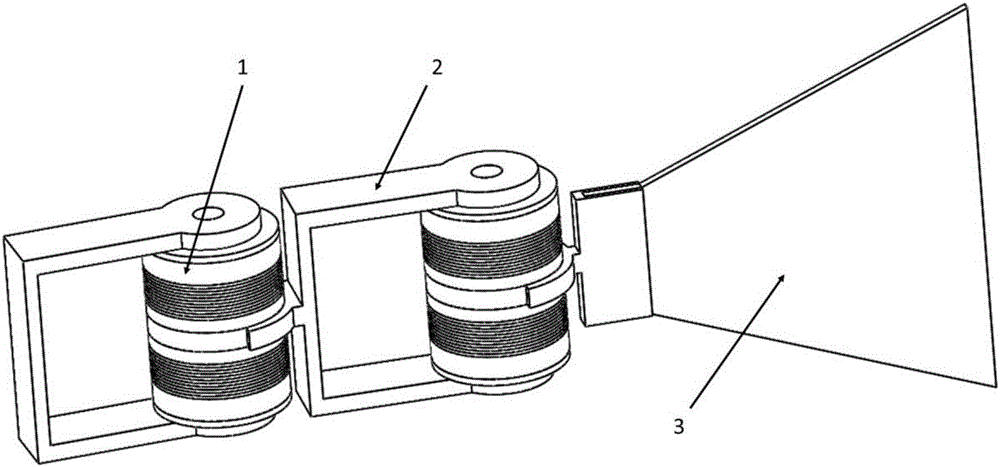
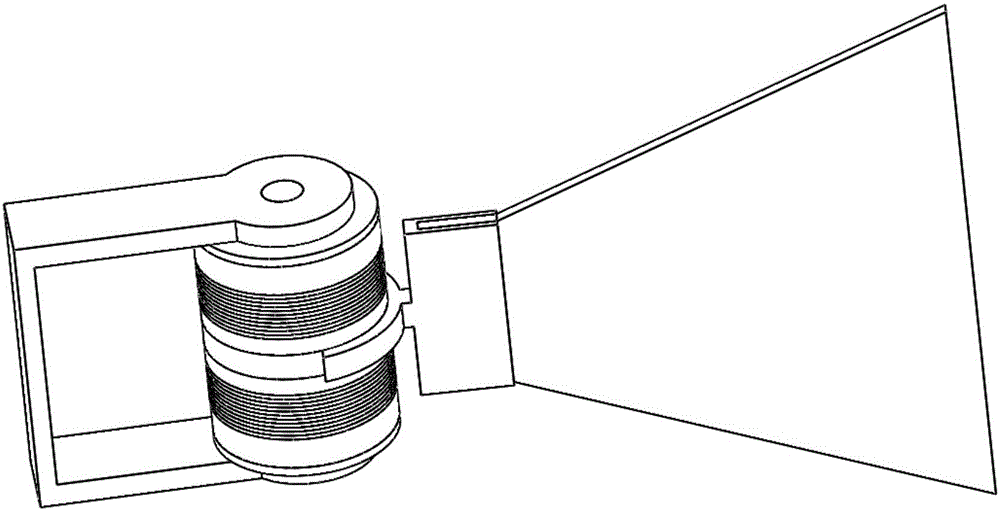
[0018] Taking the stiffness controllable underwater bionic propulsion device with two or more variable stiffness systems as an example, figure 1 It is a schematic diagram of the structure contained in the stiffness-controllable underwater bionic propulsion device of the present invention, such as figure 1 As shown, the bionic propulsion device with controllable stiffness is composed of a bionic fish tail fin 3 and several variable stiffness systems, and each variable stiffness system includes: a variable stiffness joint 1 and a joint connection frame 2 . in:
[0019] In the variable stiffness system, both ends of the variable stiffness joint are connected to the end of the joint connecting frame, and the front end of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More