

Substation wheeled obstacle surmounting mechanism, robot and method thereof
A substation and robot technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of poor environmental adaptability, low efficiency, complex control system and mechanical structure, etc., achieve high automation, reduce input costs, and overcome obstacles simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
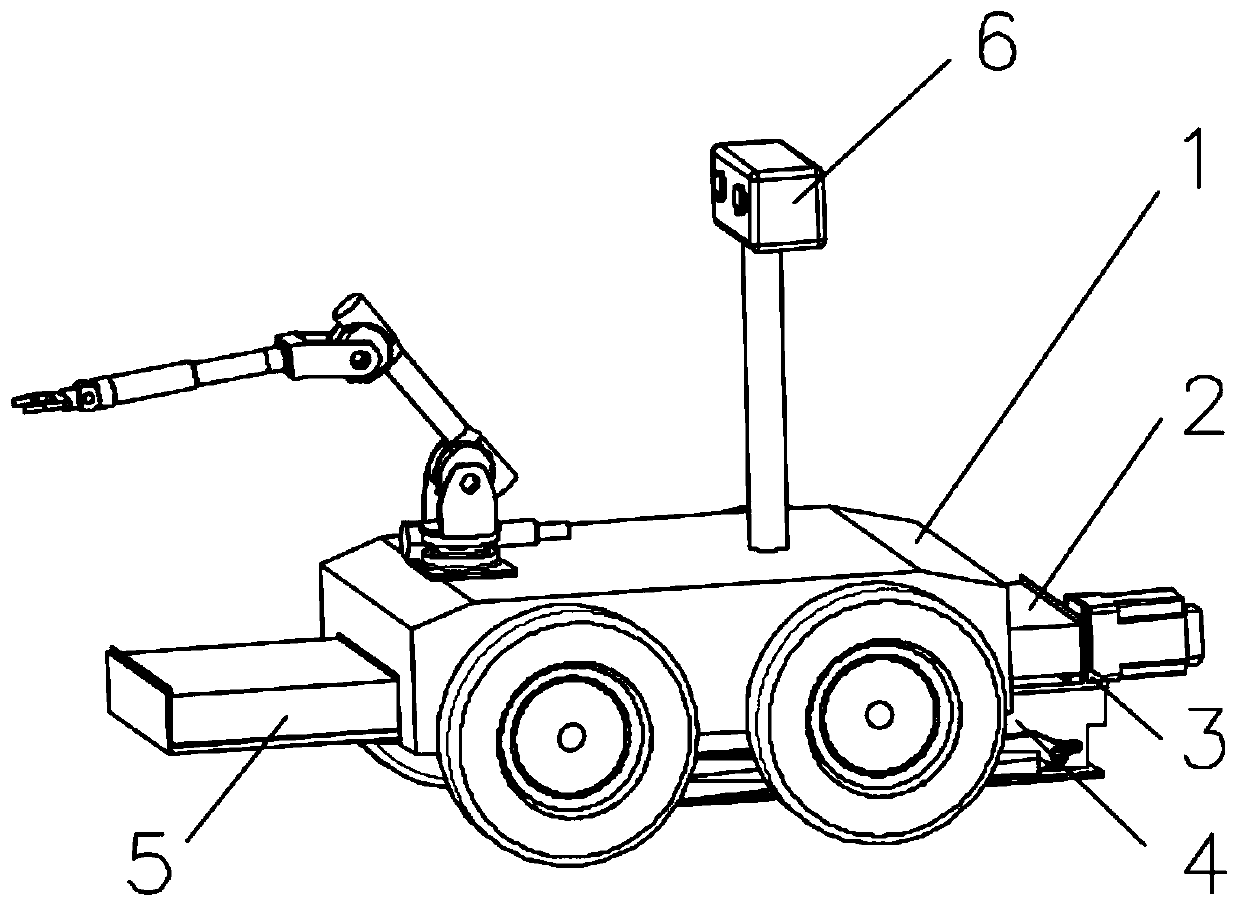
[0037] The invention proposes a novel wheeled obstacle-surmounting robot for a substation. The wheeled robot uses wheels to walk normally on ordinary flat roads; when encountering a curb (the height of the curb is 100-200mm), the wheeled robot uses a lifting platform and a screw guide mechanism to assist it to cross obstacles.
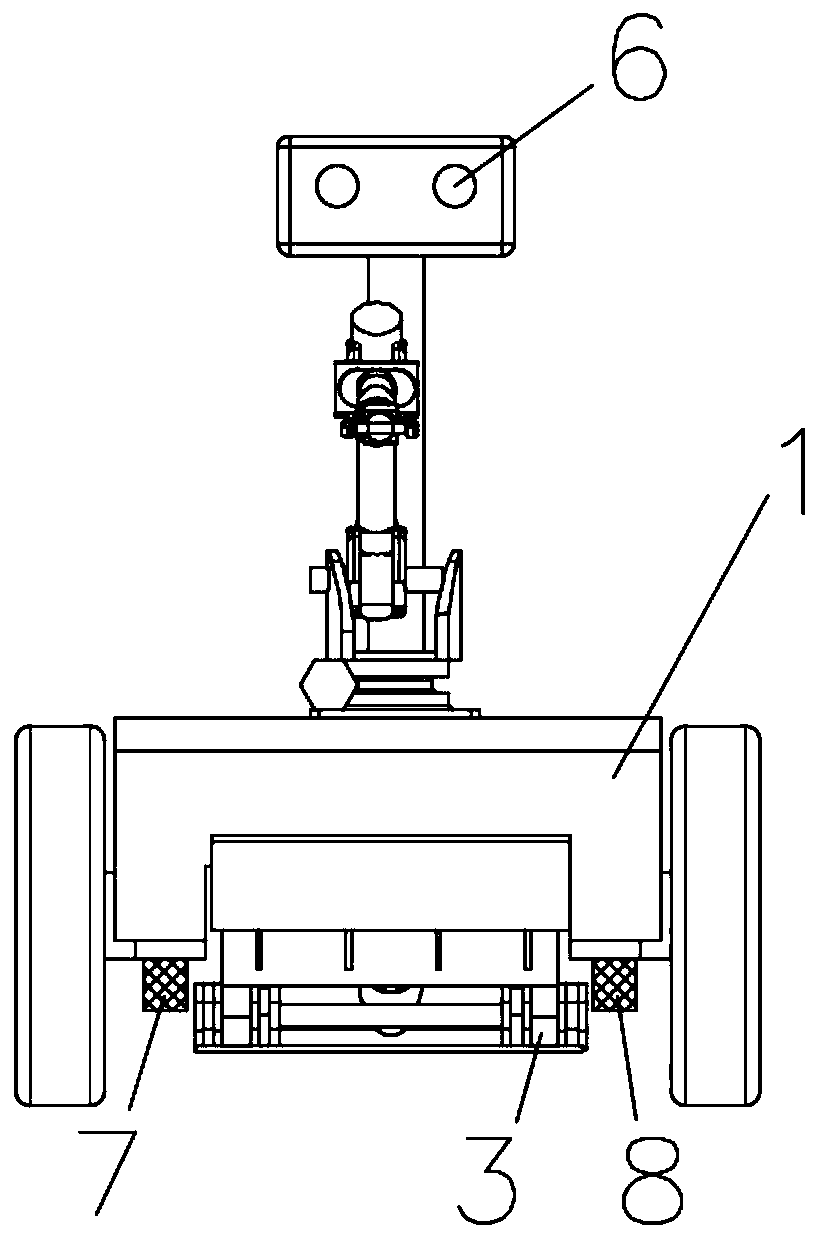
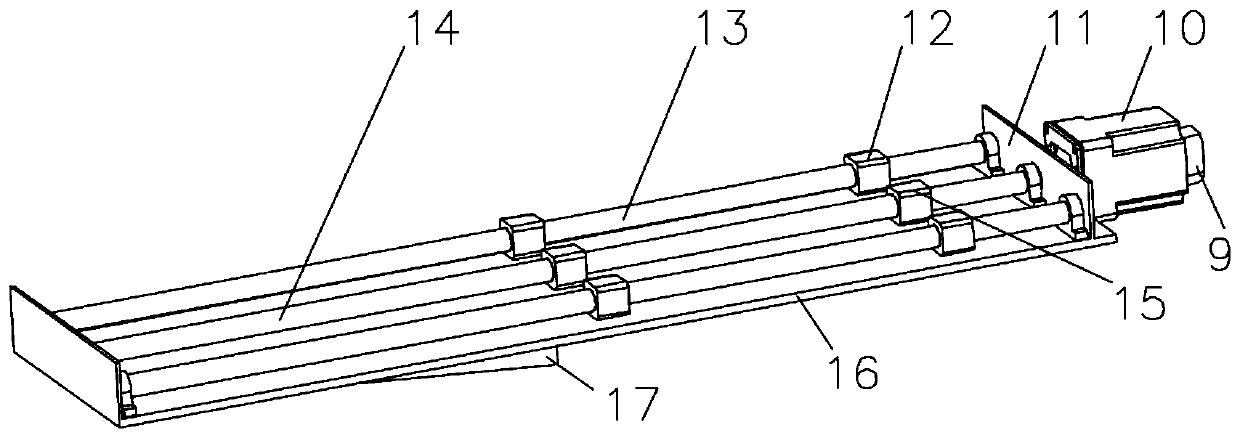
[0038] The wheeled robot chassis 1 is an ordinary substation inspection robot, and its internal drive mode is dual-motor front-wheel drive. The wheeled robot chassis 1 is connected with the lead screw guide rail mechanism 3 through four sliders 12, two screw nut sliders 15, the bottom of the wheeled robot chassis 1 and the four sliders 12, two screw nut sliders 15 It can be connected by screws, and the left distance sensor 7 and the right distance sensor 8 are installed under the wheeled robot chassis 1, which are symmetrically...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More