

Patrol wheel-pedrail type obstacle-crossing robot for transformer substations
A robot, wheel-tracking technology, applied in the field of robots, can solve the problems of the crawler not in contact with the ground, unable to achieve the climbing function, and limiting the robot's ability to overcome obstacles, so as to reduce on-site construction and improve the ability to overcome obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
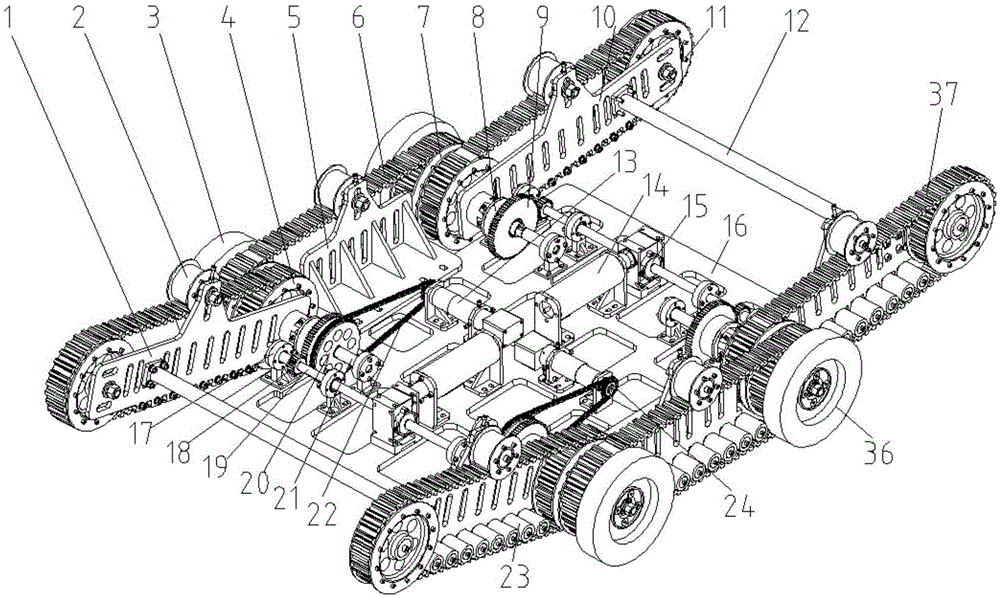
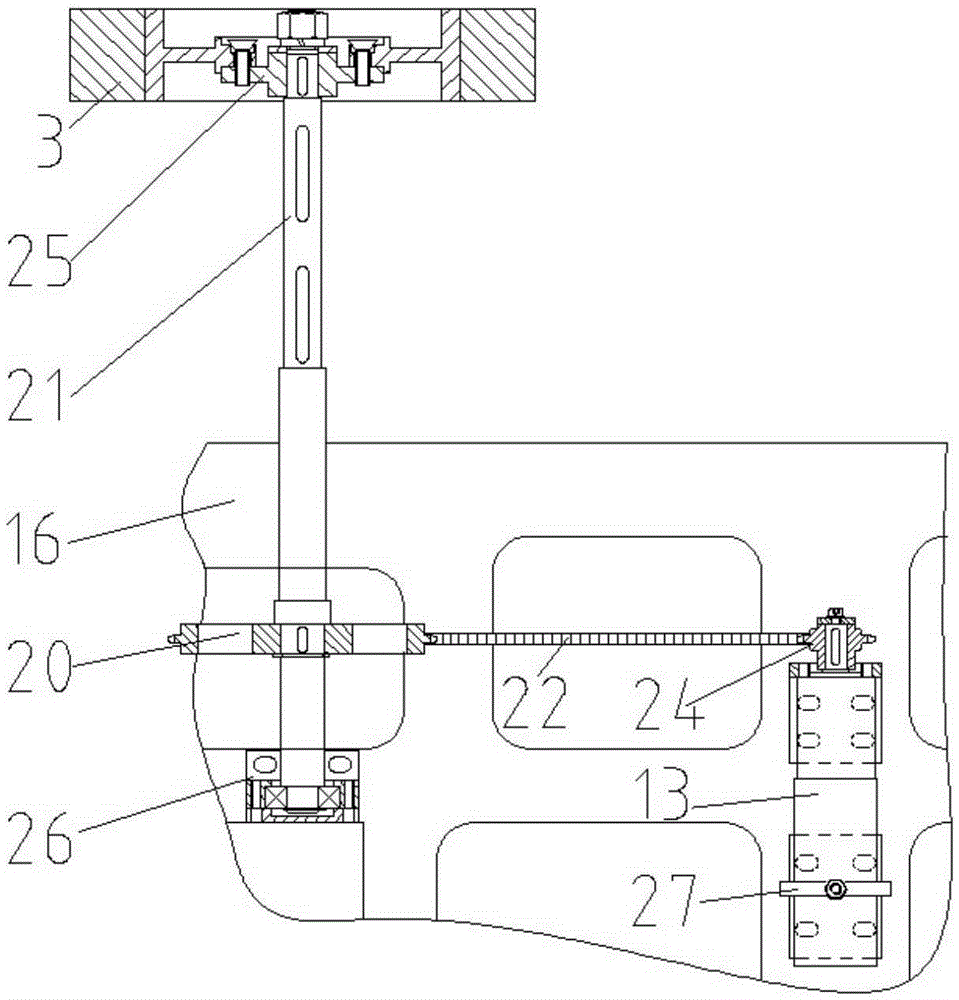
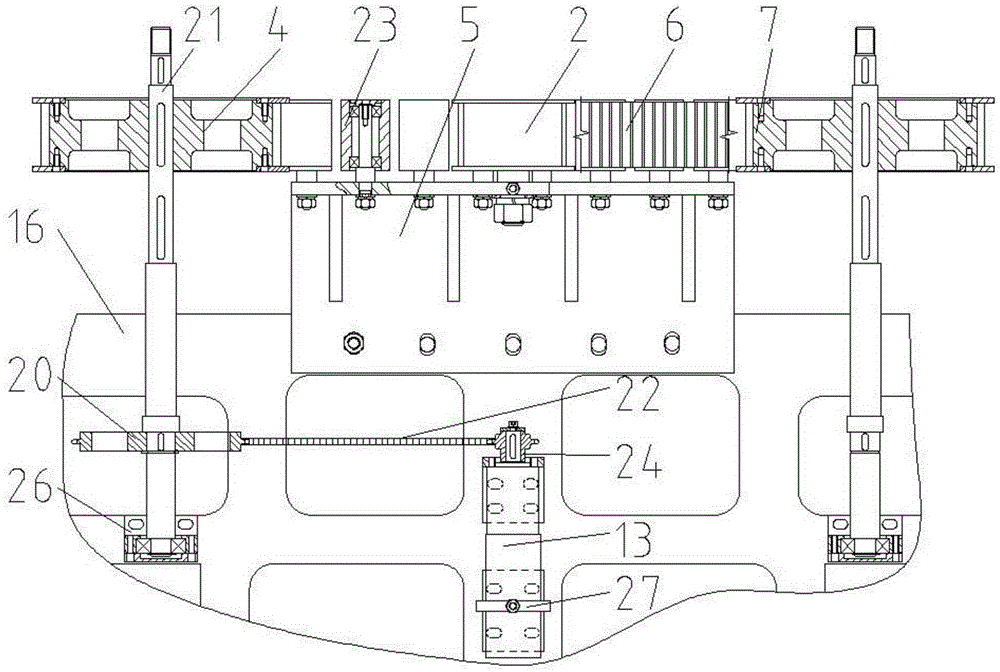
[0047] Embodiment: A substation inspection wheel-track obstacle-climbing robot, whose structure refers to figure 1 and figure 2As shown, including the chassis 16; the front part of the chassis 16 is fixed with two sprocket reduction motors 13 through the sprocket motor seat 27, and a small sprocket is installed on the output shafts of the two sprocket reduction motors 13 through the connecting key. 24. The small sprocket 24 is transmitted to the large sprocket 20 through the chain 22 to realize the step-by-step transmission of the torque output by the sprocket reduction motor 13. The large sprocket 20 is installed on the transmission shaft 21, and the power is then transmitted to the transmission shaft through the connecting key 21. One end of the transmission shaft 21 is fixed on the transmission shaft bearing seat 26, and the transmission shaft bearing seat 26 is installed on the chassis 16. The other end of the transmission shaft 21 drives the road wheel collar 25, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More