

Robot foot device with self-adaptive capability to terrains
An adaptive, robotic technology used in robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
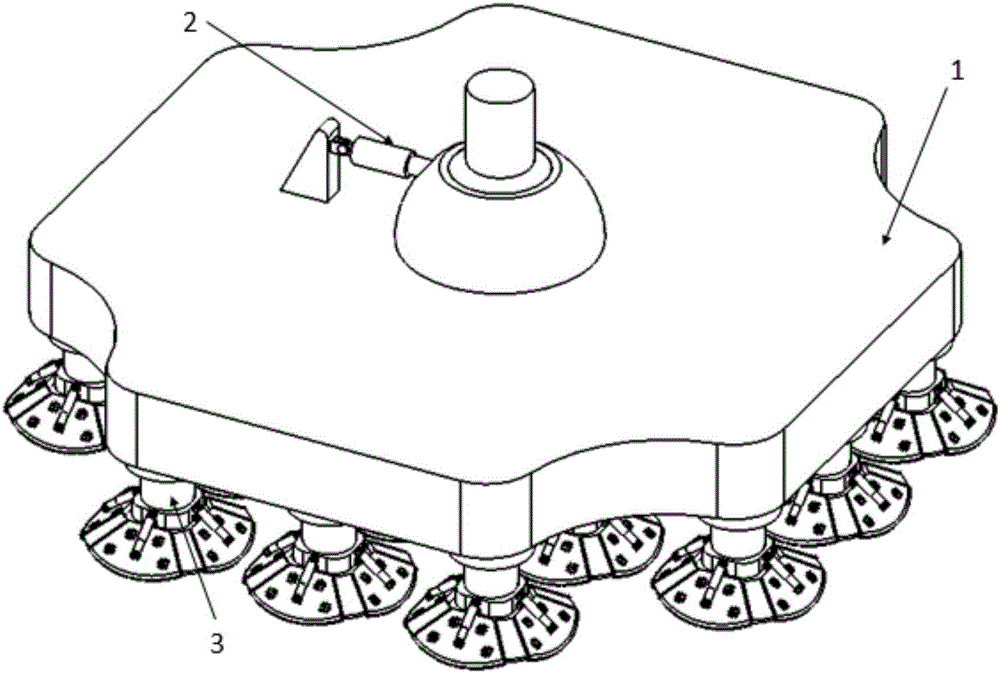
[0020] Such as figure 1 Shown, an adaptive robotic foot assembly for attaching to a robotic leg, comprising:
[0021] Including sole structure 1, ankle structure 2 and toe structure 3;
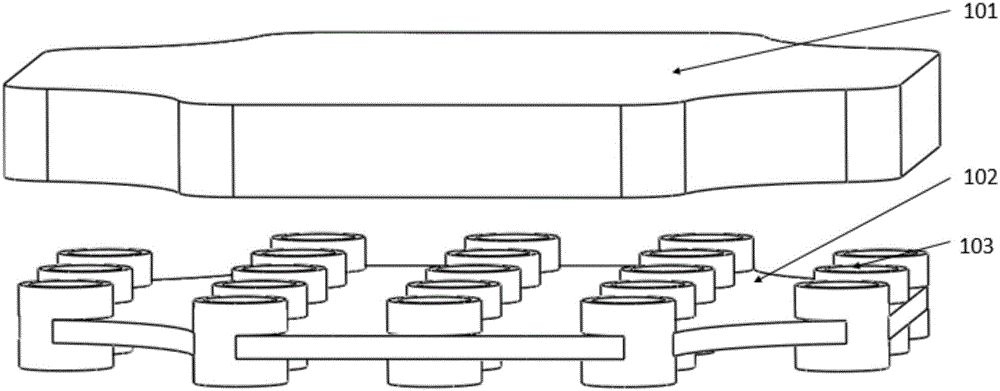
[0022] Such as figure 2 As shown, the sole structure 1 includes an upper foot plate 101 and a lower foot plate 102; the lower foot plate 102 is provided with several piston holes 103; the upper foot plate 101 is set on the upper part of the lower foot plate 102, and the inside is a closed cavity filled with hydraulic oil;
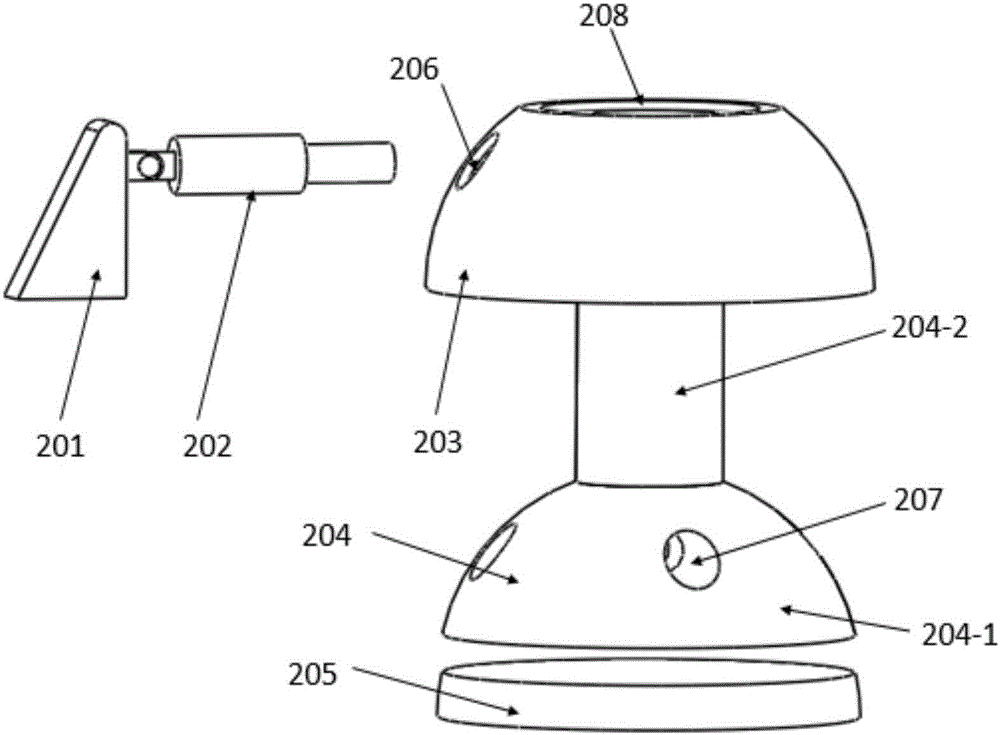
[0023] Such as Figure 4 As shown, the toe structure 3 includes a piston 301, a piston rod 302, a toe petal 303 and a damper 304; the piston 301 is inserted into the piston hole 103 of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More