

Space debris large envelope capturing system with mechanical arms capable of being ejected out
A space debris and capture system technology, applied in the aerospace field, can solve the problems of increased system control difficulty, difficult system dynamics control, complex flexible dynamics, etc., to achieve excellent capture effect, strong inclusiveness, and easy control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings.
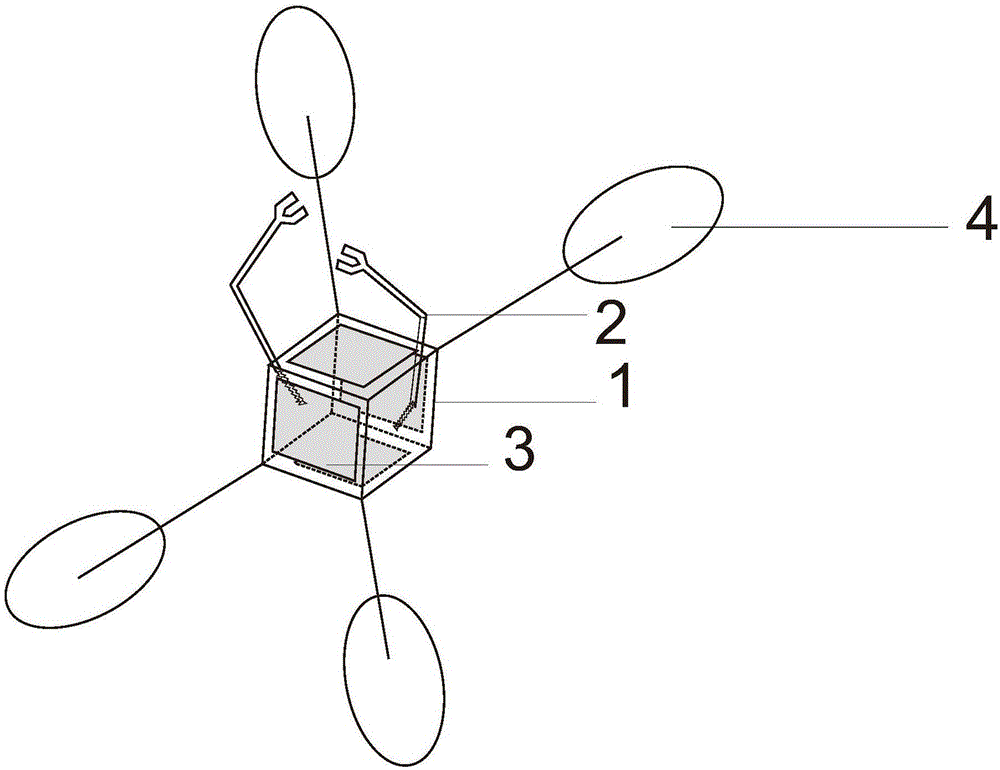
[0022] see Figure 1-5 , the large envelope capture system for space debris that can be ejected by the manipulator of the present invention structurally includes a six-sided cube-shaped satellite main body 1, on which the satellite main body 1 is equipped with solar sail panels 4, and four solar sail panels 4 are arranged uniformly. Distributed around the satellite main body 1, the solar sail panel 4 includes a telescopic support rod 10 connected to the satellite main body 1 and a solar opening and closing sail panel installed on the top of the telescopic support rod 10. The two sub-boards rotated at the top of the bracket rod 10 are combined. The two sub-boards of the solar folding sail panel 11-A overlap with the top of the telescopic bracket rod 10 before unfolding. After deployment, the solar folding sail panel 11-B The two sub-boards are rotated and com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More