

Route planning method based on road chain
A road link and path technology, applied in the field of path planning, can solve the problems of inconsistent road perceptual knowledge, reduced algorithm operation efficiency, poor road continuity, etc., to achieve the effect of convenience and speed, reduction of trivialities, and reduction of turning points.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Combine below figure 1 The present invention is further described:
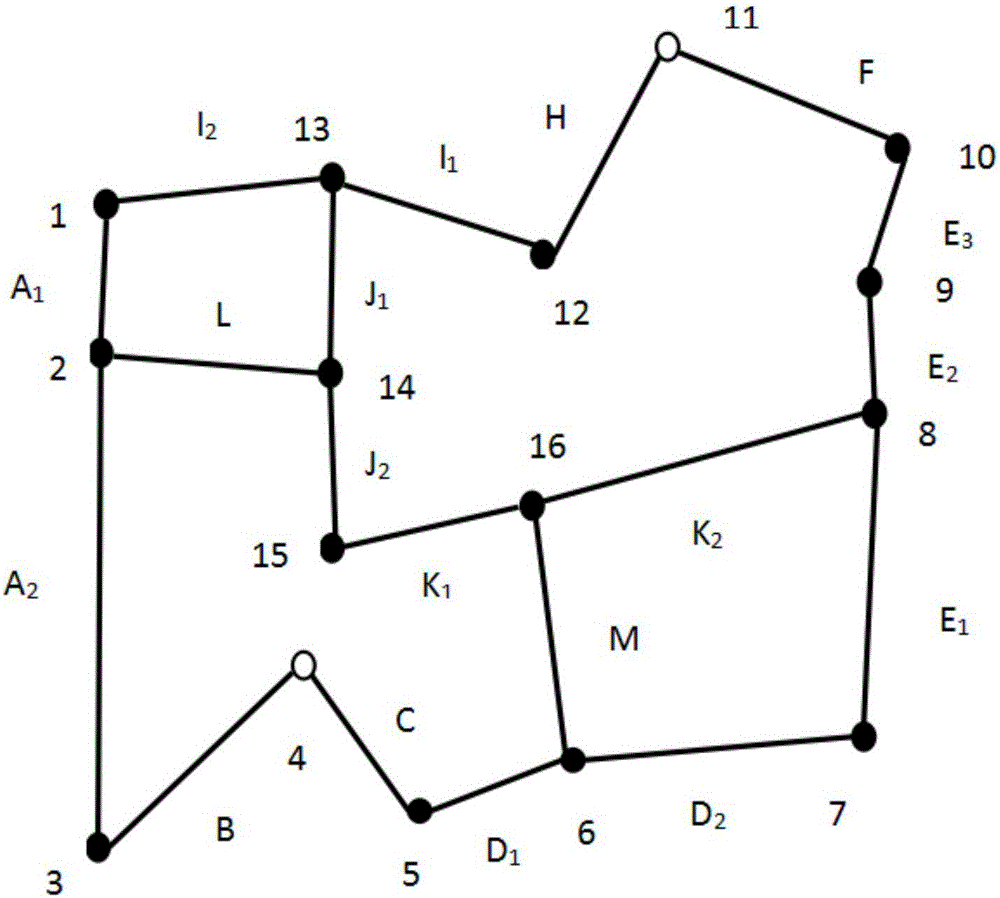
[0026] refer to figure 1 , in the schematic diagram of the scene in the specific embodiment of the present invention, the dots represent the nodes in the road network, numbered with 1-16 respectively, and the black straight lines represent the arcs in the road network, respectively represented by A 1 -M number, hollow dot 11 represents the end point, and hollow dot 4 represents the starting point.
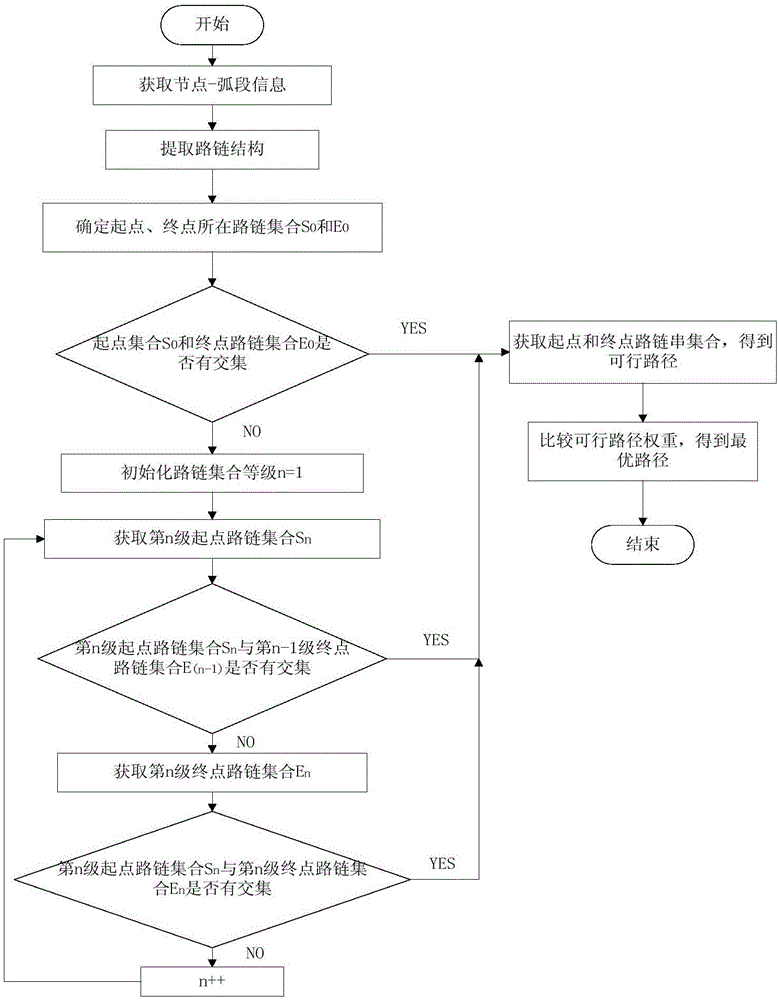
[0027] refer to figure 2 , the implementation steps of the present invention are as follows:
[0028] Step 1. Obtain node-arc information, and use node-arc information to extract link information.
[0029] 1.1) Obtain road network node-arc information:
[0030] 1.11) Extract point elements in the road network as junctions, and extract line elements as edges;
[0031] 1.12) According to the edge-edge connectivity strategy, junction-edge connectivity strategy, and elevation field usage rules, establish...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More