

Precise path tracking control method for autonomous underwater vehicle
An underwater vehicle, tracking control technology, applied in the direction of three-dimensional position/channel control, etc., can solve problems such as large impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
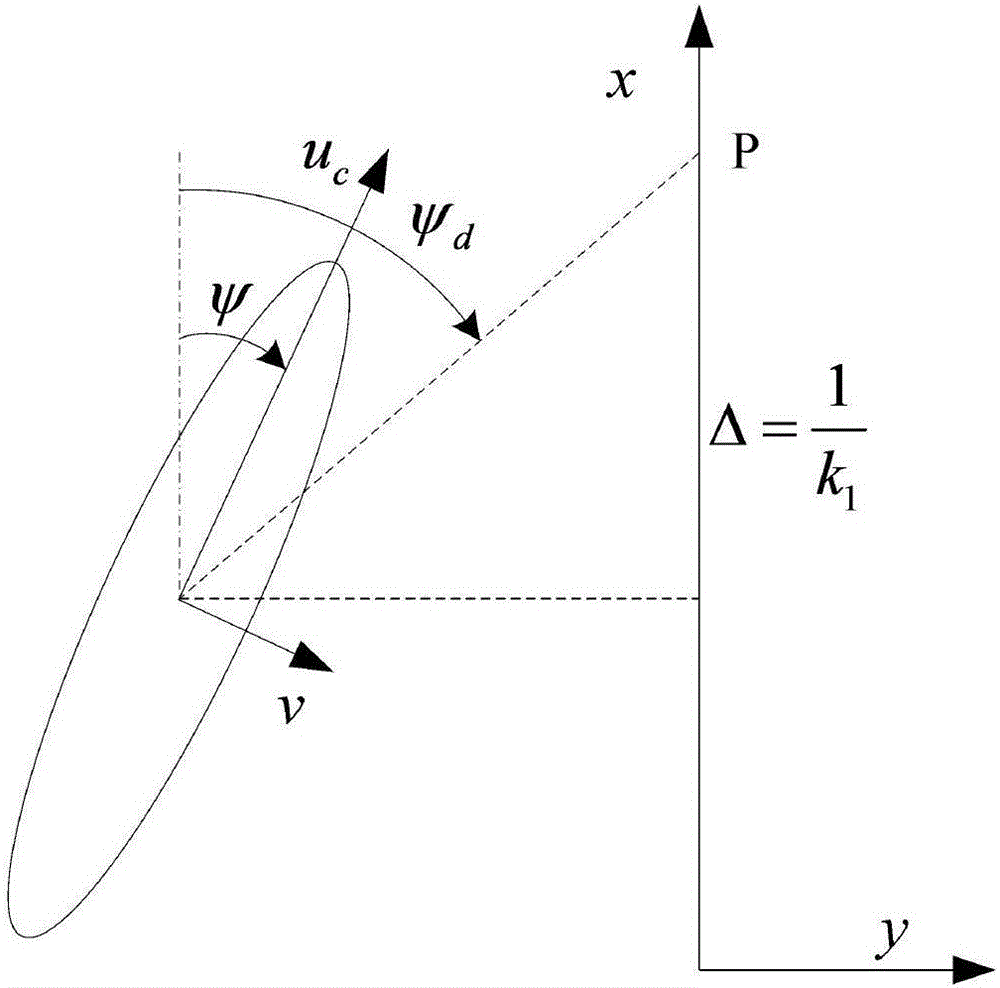
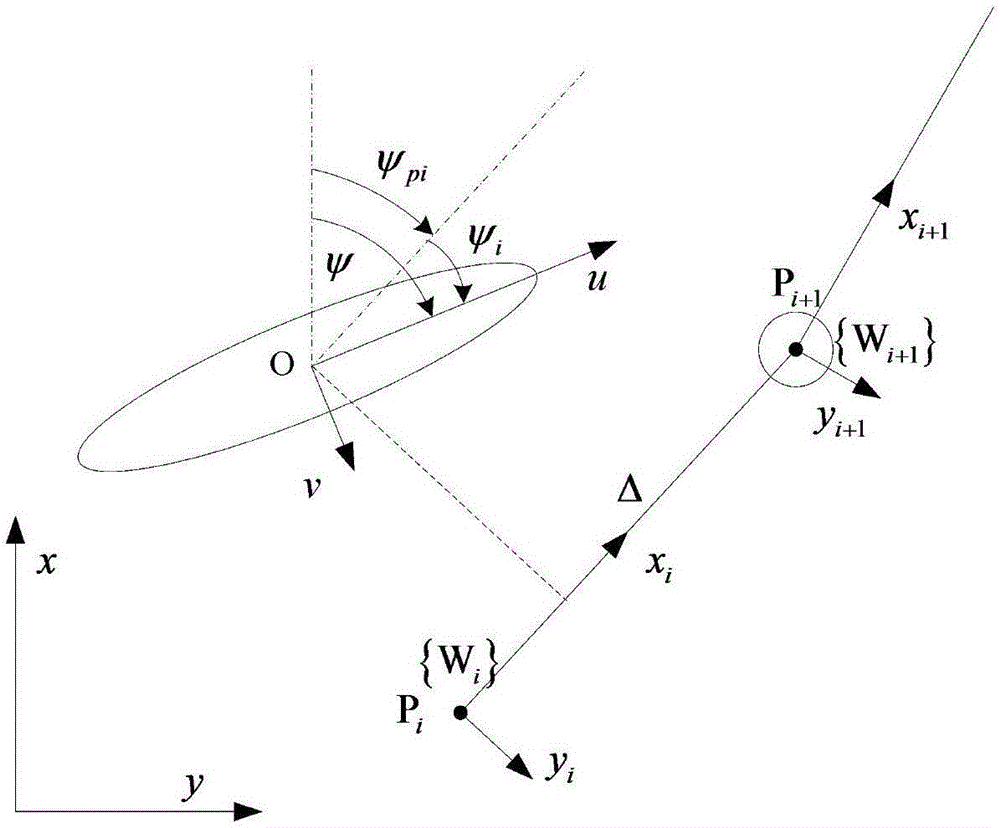
[0039] refer to figure 1 and figure 2 , a precise route tracking control method for an autonomous underwater vehicle, the steps are as follows:
[0040] Step 1: Establish a mathematical model of the AUV horizontal plane:
[0041]
[0042]
[0043]
[0044]
[0045] Step 2: The AUV starts to perform straight-line tracking control motion in the initial state, where y(0), ψ(0), v(0) and r(0) can be set before the AUV sails;
[0046] Step 3: Assume point P 1 -P n is a specified series of waypoints;
[0047] Step 4: Select the previous waypoint P i is the coordinate origin, and the x-axis points to the current target waypoint P i+1 The waypoint coordinate system {W i},Such as figure 2 shown.
[0048] Step 5: AUV in {W i} coordinates in the coordinate system (x i ,y i ) and heading angle ψ i It can be obtained by the following coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More