

Minimally invasive spine surgery robot main terminal work station
A minimally invasive surgery and robot-based technology, which is applied in the field of operating consoles, can solve the problems of the main operating terminal not playing a role in positioning, multiple positioning, and long preparation time for surgery, so as to shorten auxiliary time, improve accuracy, Guaranteed safety and real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
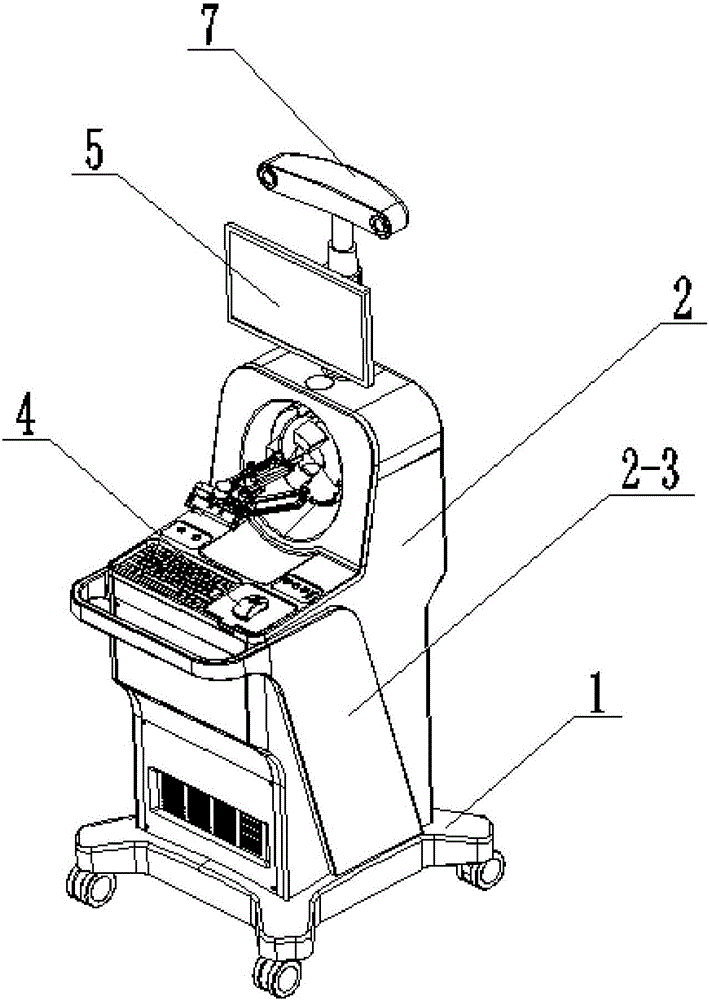
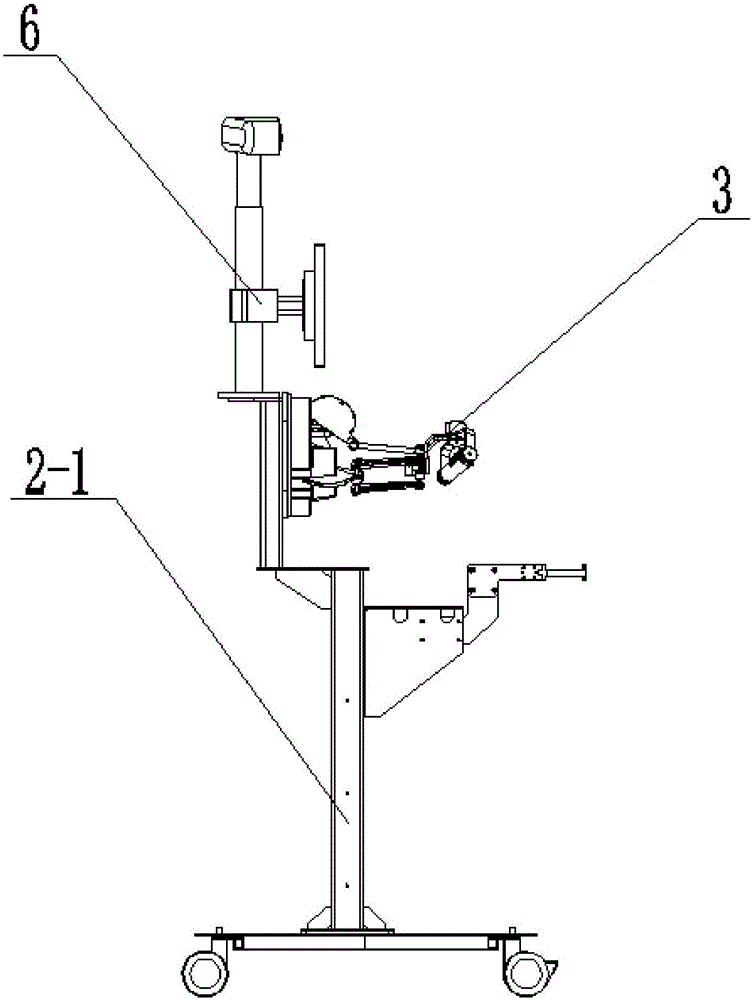
[0015] Specific implementation mode one: combine figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 and Figure 6 Describe this embodiment, a main end operation table of a minimally invasive spinal surgery robot, which includes a base 1, a main body 2, a main hand 3, a keyboard and mouse 4, a display 5, a bracket 6 and an optical measurement system 7, and the main body 2 is installed on the base 1 above, the main hand 3 and the keyboard and mouse 4 are installed on the main body 2, the monitor 5 is installed on the upper part of the main body 2 through the bracket 6, the optical measurement system 7 is installed on the upper end of the main body 2, and the optical measurement system 7 is located above the display 5, the optical The measurement system 7 provides the position and attitude information of the patient and the robot for the robot navigation system in real time during the operation.
[0016] The optical measurement system 5 can accurately obtain the positio...
specific Embodiment approach 2
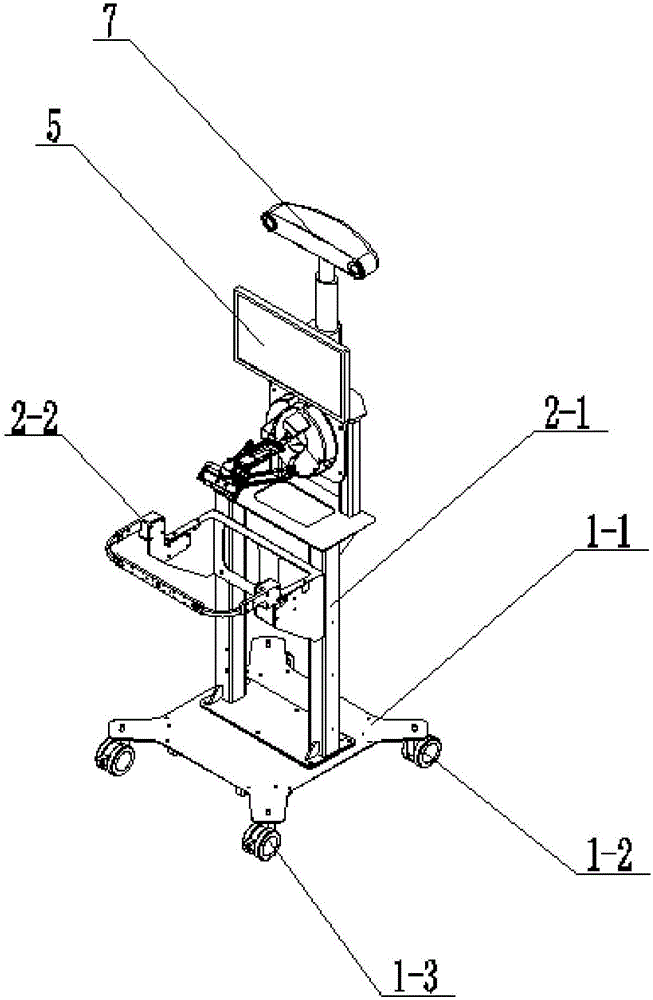
[0019] Specific implementation mode two: combination figure 1 Describe this embodiment, the base 1 of this embodiment includes a chassis 1-1, a first group of casters 1-2 and a second group of casters 1-3, and the first group of casters 1-2 and the second group of casters 1-3 are installed on On chassis 1-1. With such a setting, it is convenient to move the entire operating table according to the actual working conditions, which provides convenience for the smooth progress of the operation. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0020] Specific implementation mode three: combination figure 1 This embodiment will be described. The second set of casters 1-3 in this embodiment are brake casters. Such setting is convenient for providing a safe and stable environment for the operation in progress, and prevents the operating table from moving during the operation and affecting the effect of the operation. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More