Design method of single-delay controller for multiple mobile robots based on lambert W function
A mobile robot and design method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of system periodic oscillation, inability to meet performance index requirements, and difficulty in global control objectives, and achieve fast collaborative control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0061] Step 1. Based on the principle of rigid body kinematics and considering the time lag of the input and output of the mobile robot, the Lagrangian method is used to establish a mobile robot model with the following transfer function:
[0062]
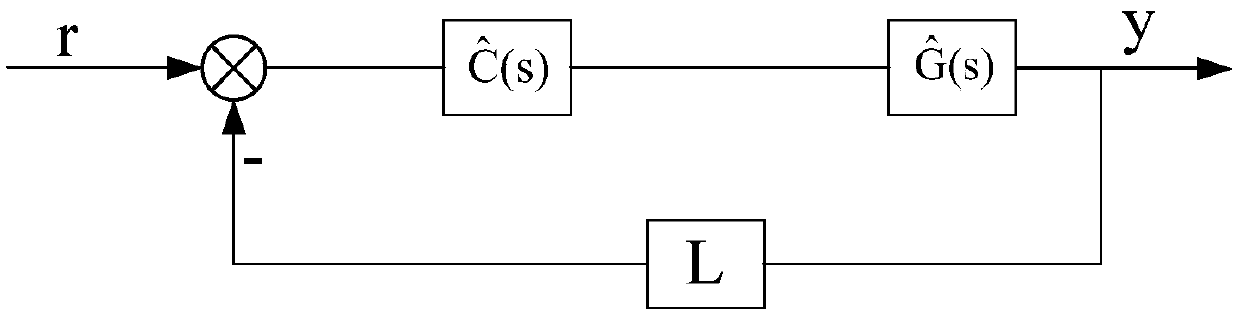
[0063] Step 2. Establish a single time-delay controller for the multi-mobile robot system. The system control block diagram is as follows figure 2 As shown in the figure, Is the mobile robot model matrix with time delay, A single time delay controller matrix for the control system to achieve consistency. n is the number of neighbors of a single mobile robot, L is the Laplacian matrix corresponding to the topology of the multi-mobile robot system, r is the system input, and y is the system output.
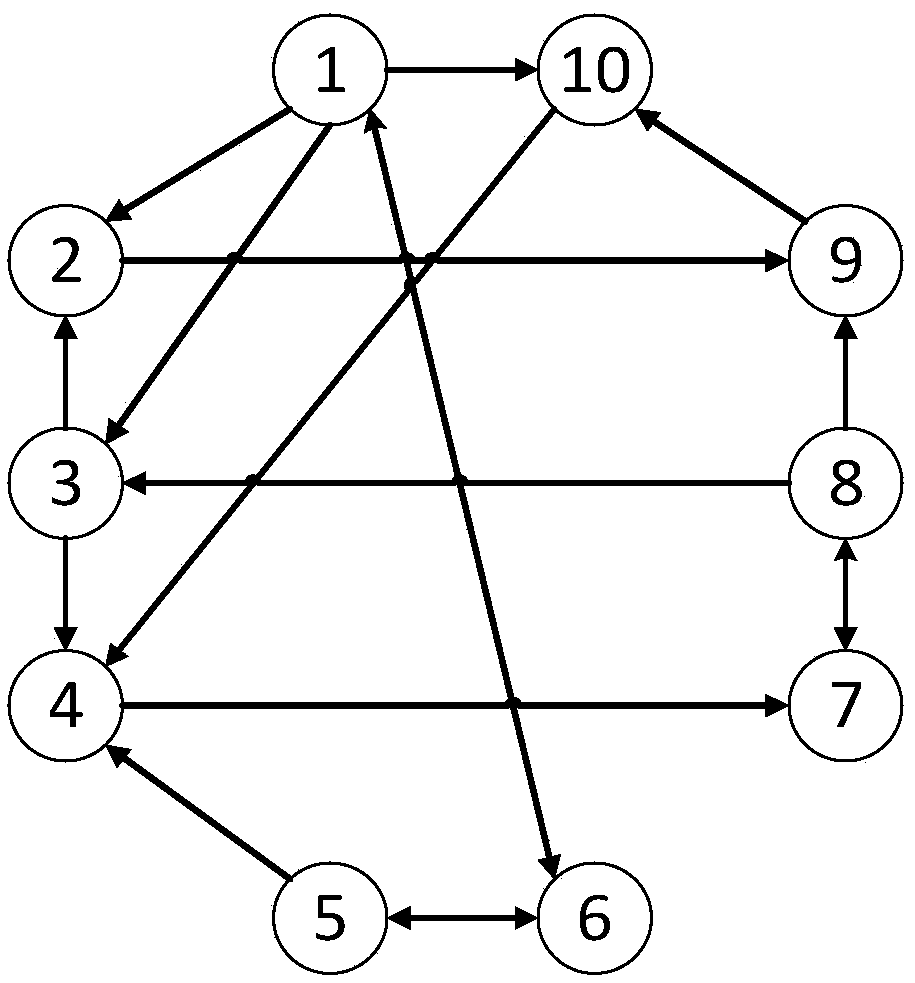
[0064] Step 3. Establish the interactive topology between multiple mobile robots such as image 3 As shown, the corresponding Laplacian matrix can be obtained, and the time delay parameter is selected as 0.15. due to image 3 The Laplacian...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More