

Multi-robot teaching and real training platform
A training platform and multi-robot technology, applied in teaching models, instruments, simulators, etc., can solve the problems of large size, lack of Delta parallel robots and SCARA robots, and large inertia, and achieve high safety, rich and friendly human-machine Interface, easy to control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
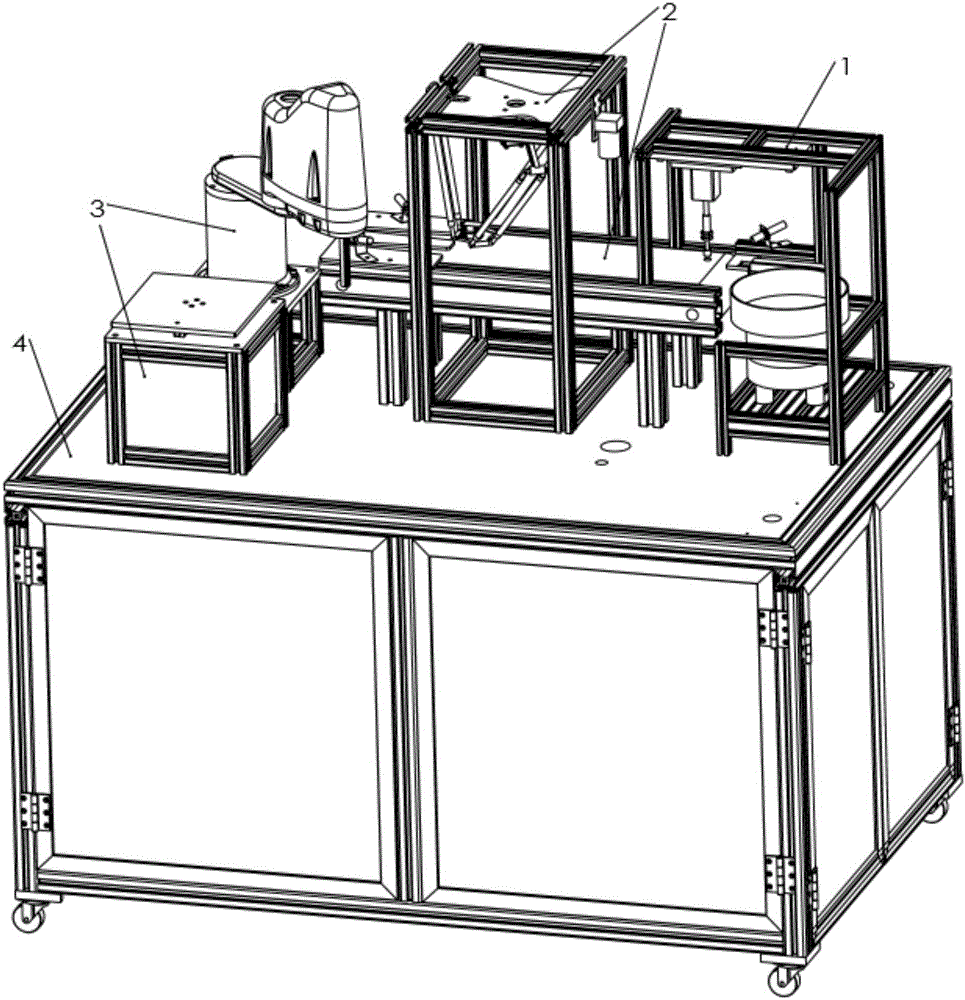
[0030] Such as figure 1 As shown, the present invention relates to a multi-robot teaching and training platform, including a feeding unit 1, a sorting unit 2, a handling unit 3, a logic control unit and a training table 4, and the logic control unit is installed on the training table 4 Inside, all the other units are installed on the training table 4 in turn to form an assembly line.
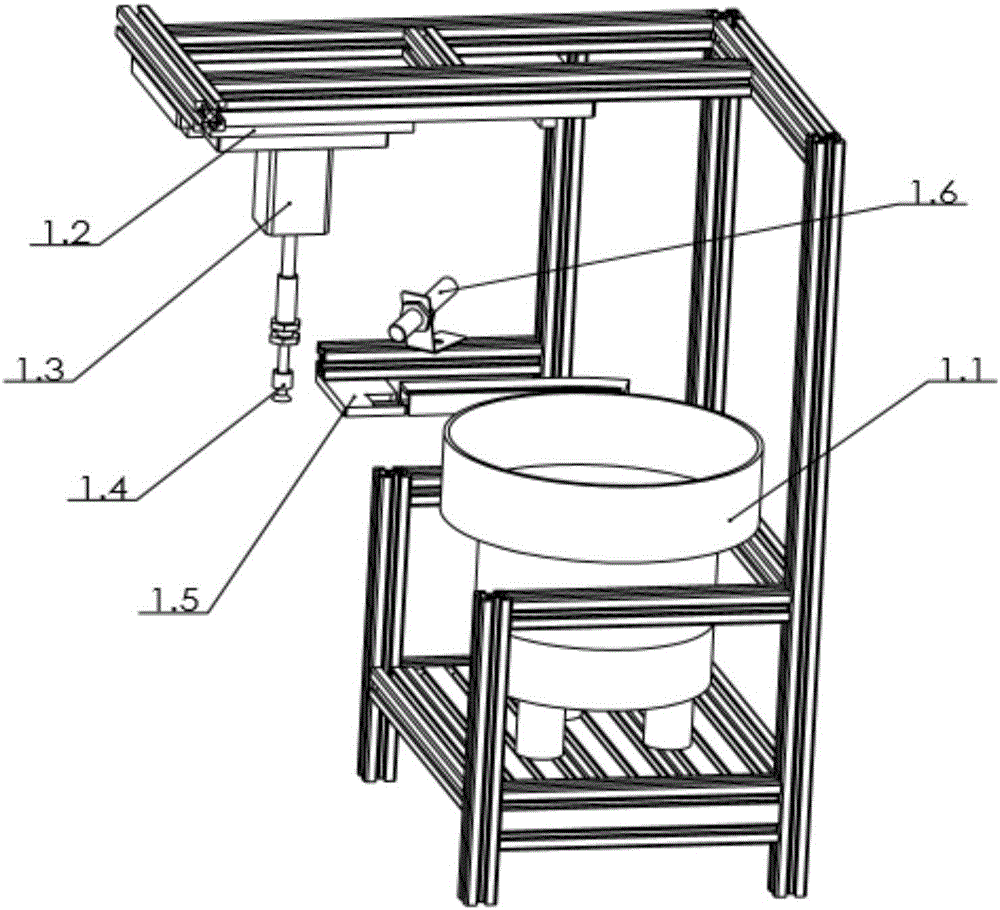
[0031] Such as figure 2 As shown, the feeding unit 1 is composed of a vibrating plate 1.1, a linear cylinder 1.2 in the front and rear directions, a linear cylinder 1.3 in the vertical direction, a first vacuum suction cup 1.4, a discharge positioning plate 1.5, and a photoelectric sensor 1.6 for feeding. The discharge positioning plate 1.5 is installed at the discharge port of the vibrating plate 1.1, the loading photoelectric sensor 1.6 is installed on the discharge positioning plate 1.5, and the front and rear direction linear cylinder 1.2 is installed above the discharge positioning plate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More