

Arm length adjusting device for upper limb exoskeleton rehabilitation robot
A rehabilitation robot and adjustment device technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of inability to differentiate the length of the upper limbs of patients, time-consuming and laborious, no arm length adjustment device, etc., and achieve stable and reliable arm length adjustment. Easy to put away and take up less space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
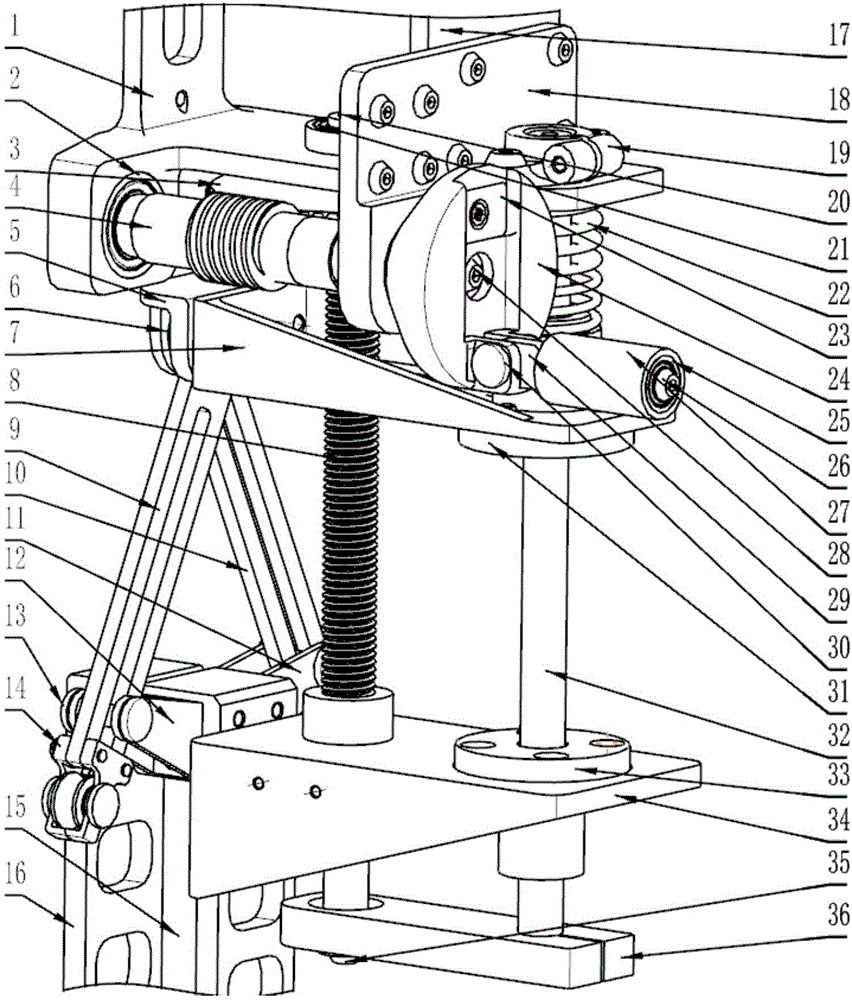
[0045] figure 1 Shown is the overall structure schematic diagram of the present invention. The upper connection assembly includes an upper left bracket 1, an upper right bracket 18, and a connecting plate 17. The upper left bracket 1 and the upper right bracket 18 are respectively installed on the left and right sides of the connecting plate 17. The upper connecting assembly constitutes the shoulder joint of the upper extremity exoskeleton rehabilitation robot. . A polished rod chuck 19 is installed on the upper right bracket 18 , and the polished rod chuck 19 can deform and shrink the inner hole under the action of the screw so as to clamp the upper end of the polished rod 32 . The arm length adjustment assembly includes a worm gear assembly and a rocker assembly. The above-mentioned worm gear assembly includes a worm wheel 3 , a worm 4 and a screw 8 . The worm 4 is rotatably installed between the upper left bracket 1 and the upper right bracket 18, and is axially position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More