

Multi-functional bionic finger capable of detecting three-dimensional force
A multi-function, three-dimensional force technology, applied in measuring devices, instruments, etc., can solve problems such as unstable grasping, failure, real-time judgment of contour shape, etc., to achieve the effect of improving operational dexterity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention provides a multifunctional bionic finger capable of detecting three-dimensional force. In order to make the technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail with reference to the accompanying drawings and examples. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
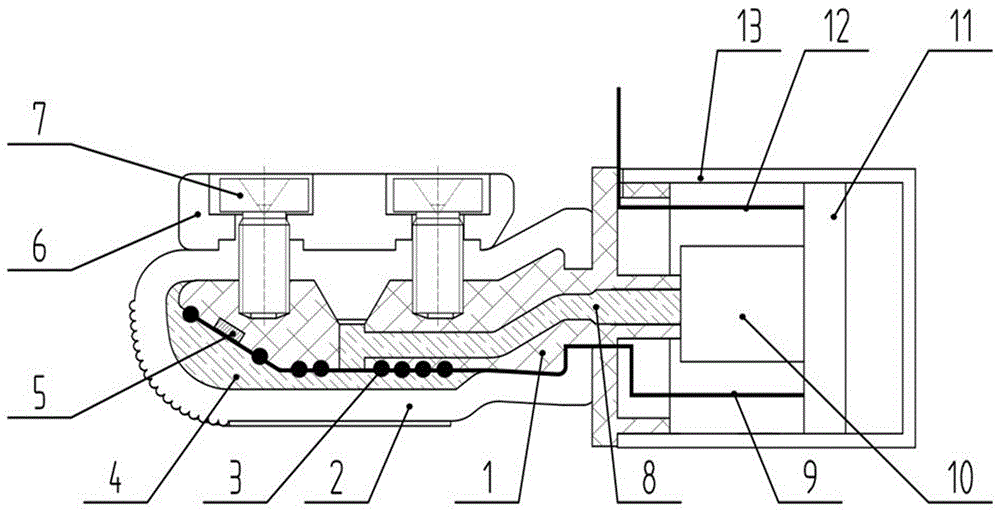
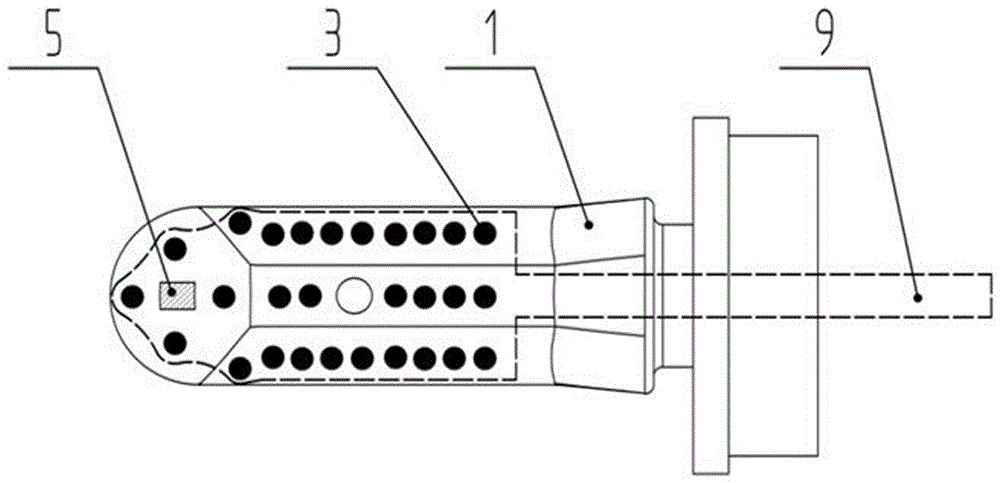
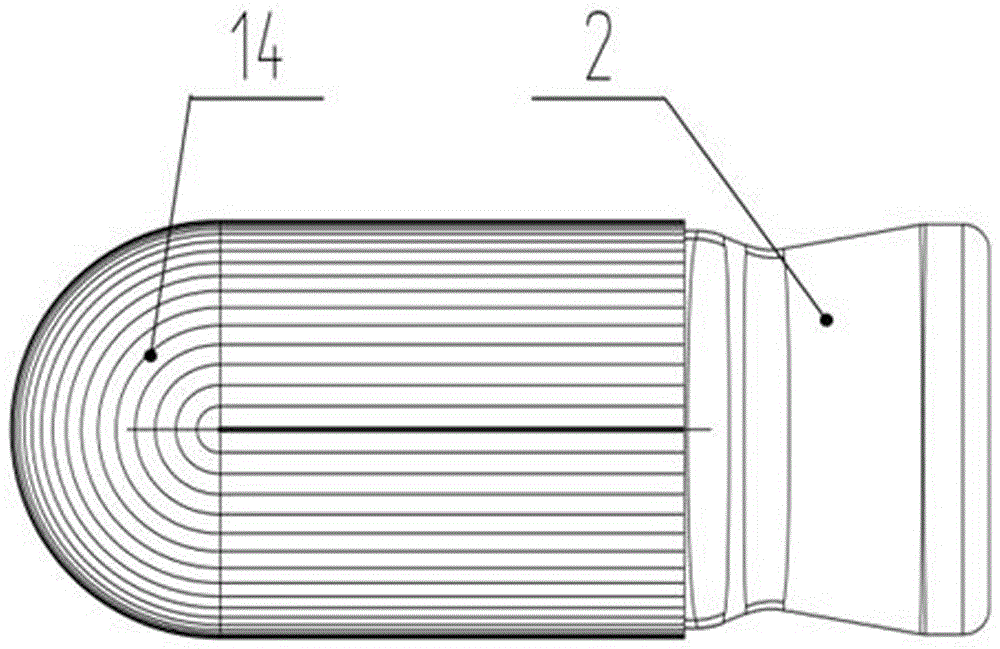
[0024] Such as Figure 1~2 As shown, a multifunctional bionic finger capable of detecting three-dimensional force designed by the present invention includes: phalanx 1, finger skin 2, electrode 3, filling medium 4, temperature sensitive element 5, nail cap 6, screw 7, channel 8, Sensitive element signal transmission circuit 9 , pressure sensor 10 , signal processing circuit 11 , external communication circuit 12 , protective case 13 , bionic texture 14 .
[0025] The specific connection relationsh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More