

Lane line extraction method and device
A lane line and straight line extraction technology, applied in the computer field, can solve the problems of different grayscale values, low extraction accuracy, and low extraction accuracy, and achieves the effect of convenient and accurate acquisition, and improved extraction speed and accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
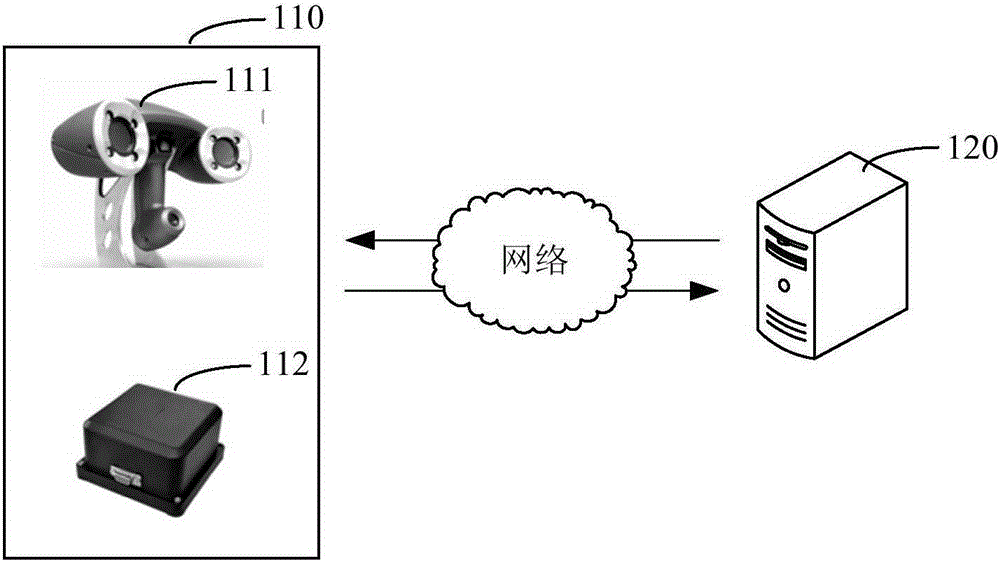
[0032] figure 1 It is an application environment diagram for running the method for extracting lane lines in an embodiment. Such as figure 1 As shown, the application environment includes a three-dimensional laser scanning system 110 and a server 120, wherein the three-dimensional laser scanning system 110 and the server 120 communicate through a network.
[0033] Three-dimensional laser scanning system 110 comprises three-dimensional laser scanner 111 and navigation system 112, and three-dimensional laser scanner 111 is the instrument that can provide the three-dimensional point cloud data of scanning object surface, and navigation system 112 is to obtain GPS (Global Positioning System, Global Positioning System) The data system can be an inertial navigation system, etc., which can collect driving trajectory data. When the three-dimensional laser scanner 110 collects three-dimensional laser point cloud data while the vehicle is driving, the navigation system 112 collects the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More