

Grapping mechanism and method for spatial targets
A capture mechanism and space target technology, applied in the field of space robots, can solve problems such as poor fault tolerance, extremely high control accuracy requirements, and small envelope range, and achieve the effects of low manufacturing cost, simple structure, and easy processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
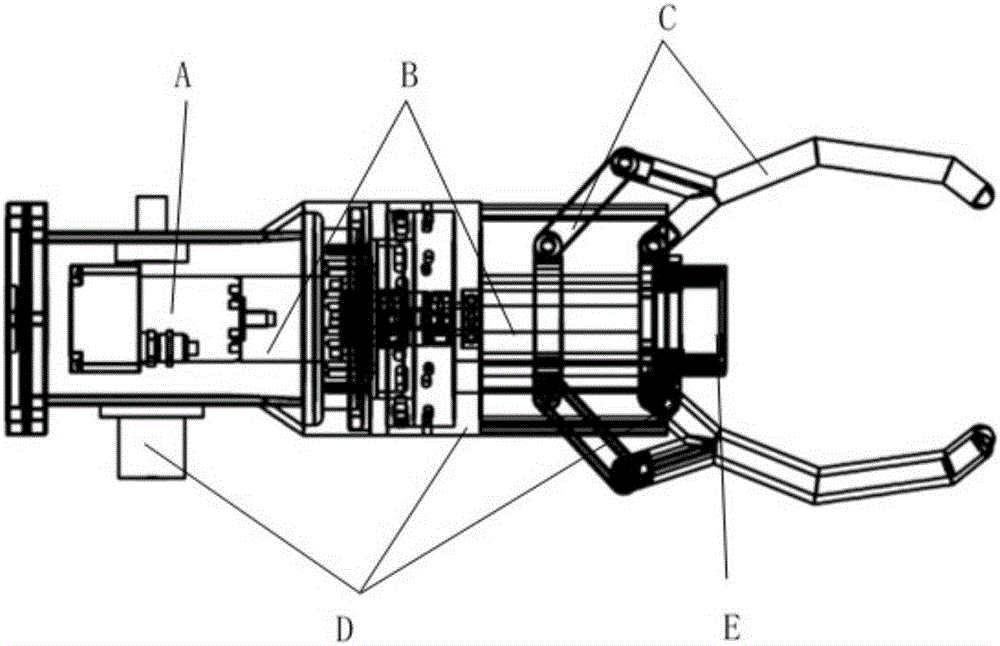
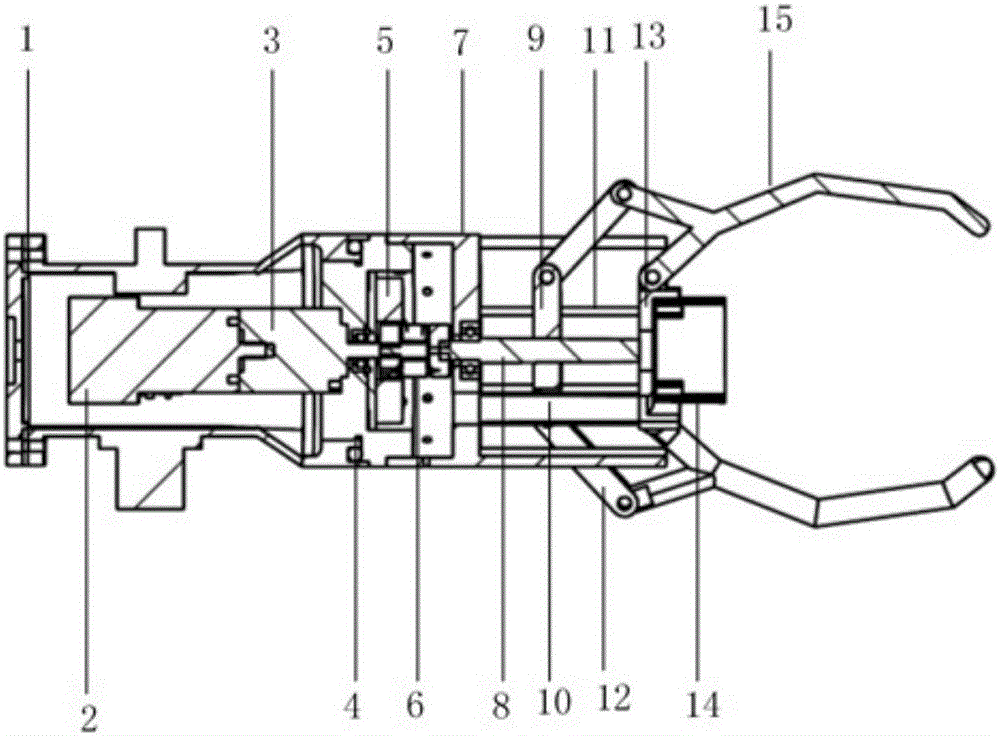
[0047] Aiming at the deficiencies of the existing capture mechanism, the present invention proposes a space target capture mechanism, which adopts a clamp-type three-finger structure to ensure that the structure is as good as possible when it bears various specified loads and has sufficient strength. Small; can be adapted to various targets (such as solar panels and sail brackets, apogee engine nozzles, star arrow docking rings, etc.); the envelope of the gripper is large; the structure is as simple as possible, self-locking, easy to process and manufacture low cost. The catching mechanism of the present invention can realize
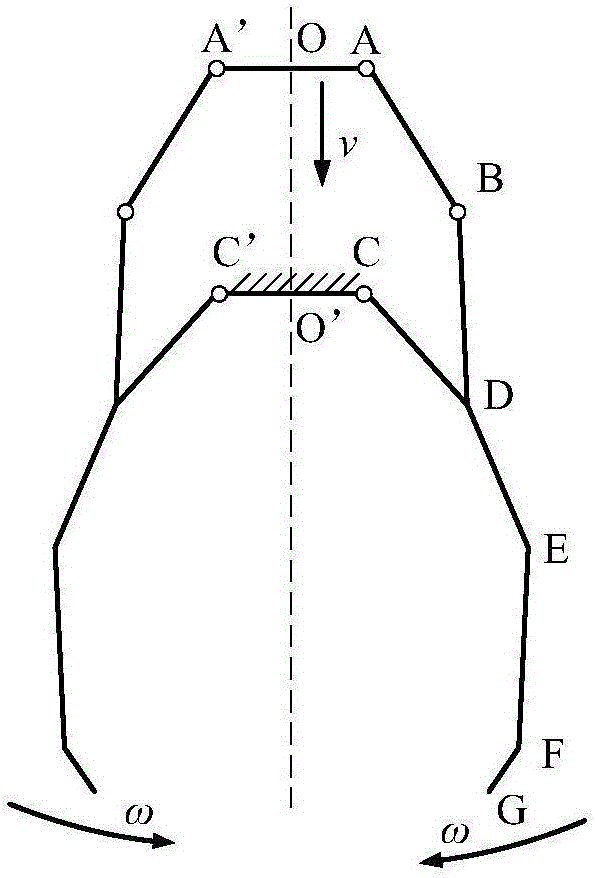
[0048] The technical solution adopted by the present invention to solve its technical problems is: a clamp-type three-finger gripper is designed, driven by a DC brushless motor, decelerated by a reduction box 3, and drives the reverse self-locking trapezoidal screw 8 to rotate and then drive The leading screw nut 9 moves up and down, and the movement o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More