

Method for enhancing teleoperation telepresence based on virtual environment reconstruction
A virtual environment and teleoperation technology, applied in the field of teleoperation technology and computer science, can solve the problems of the stability of the teleoperation system and the reduction of the presence of the tracking performance, so as to enhance the teleoperation presence, improve the presence, and reduce the delay. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment
[0062] On the operating side of the teleoperation system, a virtual slave task environment is established first, and the corresponding ratio between the real environment and the virtual environment is 1:1. Dynamically model the remote environment:
[0063]
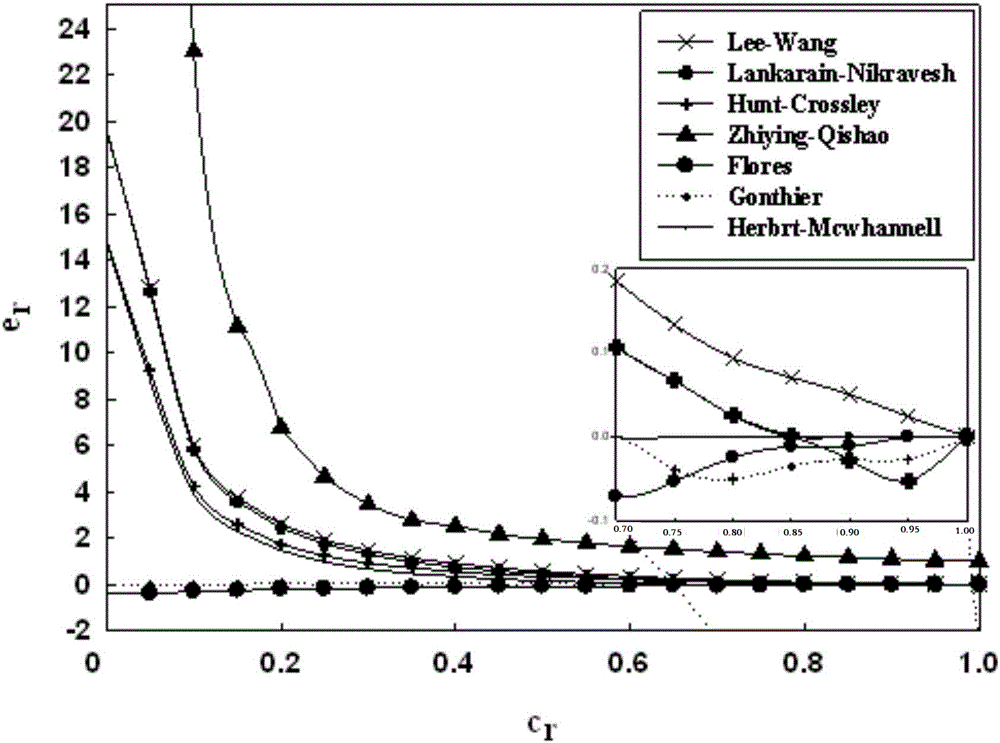
[0064] where k and λ represent the stiffness coefficient and damping coefficient at the contact, respectively. x e Indicates the depth of cut between contacts along the cut direction. Indicates the relative velocity of the contact objects at the point of contact. n represents the collision index, which represents the degree of nonlinearity of the contact material. This dynamical model can clearly explain the relationship between the remote task performer and its surrounding environment, therefore, it is necessary to establish it.
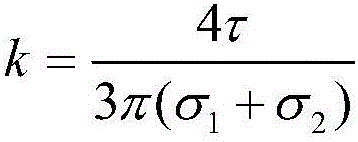
[0065] F in formula (1) e is obtained by the force sensor on the remote actuator, and the stiffness coefficient k coefficient of the contact object can be obtained by formula (2):
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More