

Clucking power feedback system in touching device
A feedback system and clamping force technology, applied in the field of clamping joints and the realization of force feedback, can solve problems such as poor versatility, and achieve the effects of easy implementation, compact structure, improved presence and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
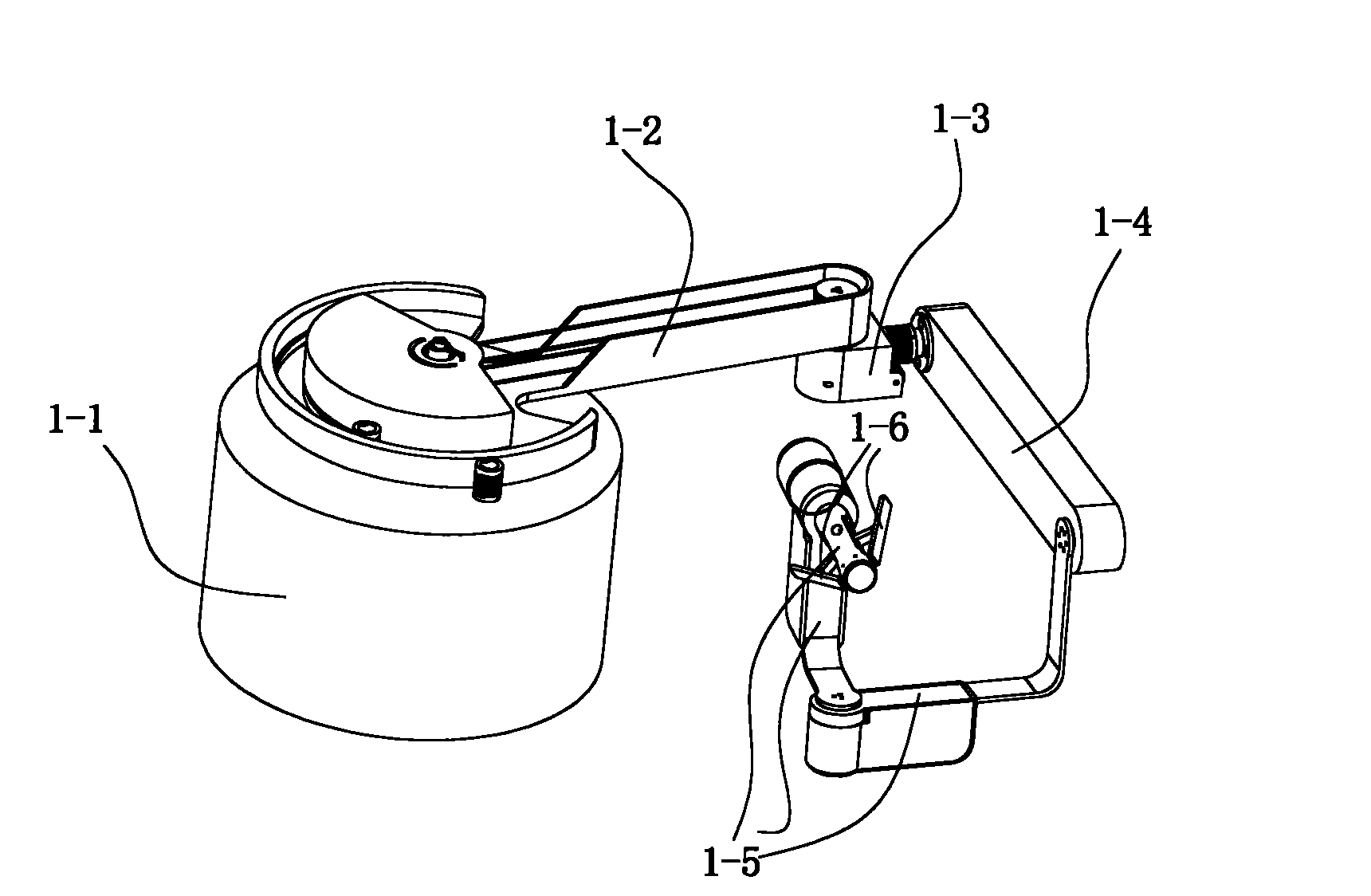
[0015] figure 1 It is an application example of the present invention in the master operator system of the master-slave teleoperation robot. figure 1 The main manipulator system includes: base 1-1, arm mechanism 1-2, elbow joint mechanism 1-3, forearm mechanism 1-4, wrist joint structure 1-5 and clamping force feedback system 1-6 of the present invention . In this example, the present invention is directly connected with the attitude frame of the wrist joint structure 1-5 of the main manipulator system, that is, the attitude frame replaces the shell and exists as a support. This wrist joint is a structure where three axes meet at one point, and the clamping force of the present invention The feedback system can also be applied to other wrist structures or exist independently in other system structures.
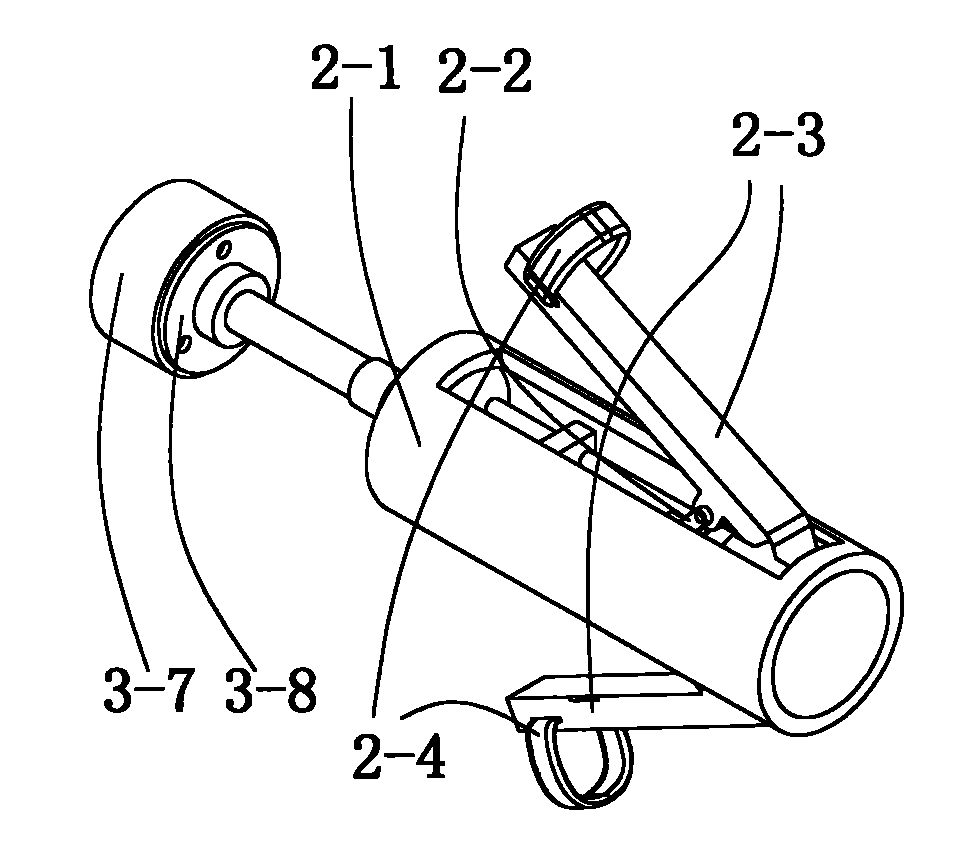
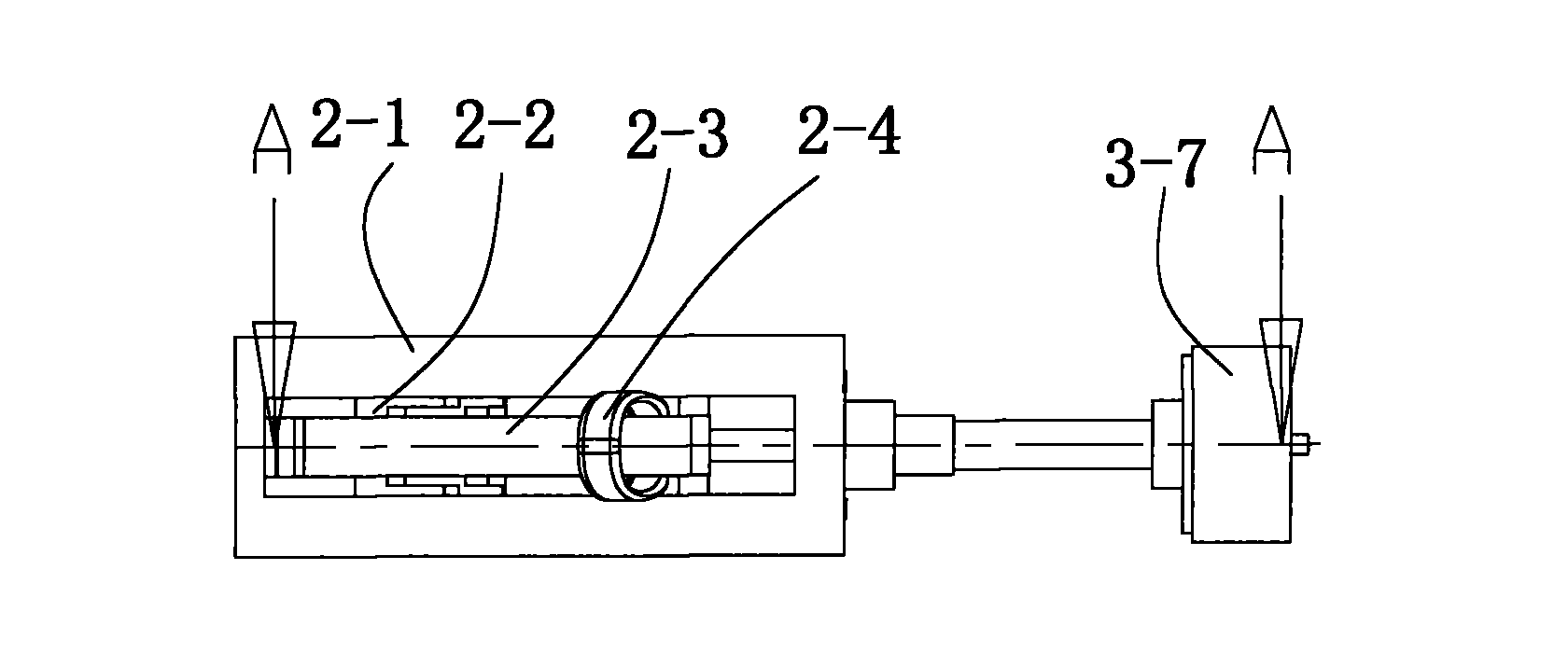
[0016] figure 2 It is a schematic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More