Resolvable task oriented task assigning method and apparatus for multiple unmanned aerial vehicles
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A task allocation and multi-UAV technology, applied in the field of communication, can solve the problem of whether the UAV has completed the target detection task or not.
Inactive Publication Date: 2017-04-26
HEFEI UNIV OF TECH
View PDF5 Cites 29 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] However, in the VRP and TSP problems, the target point to be investigated in an allocation plan is only detected once, without considering whether the detection task of the UAV to the target is completed in a detection
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
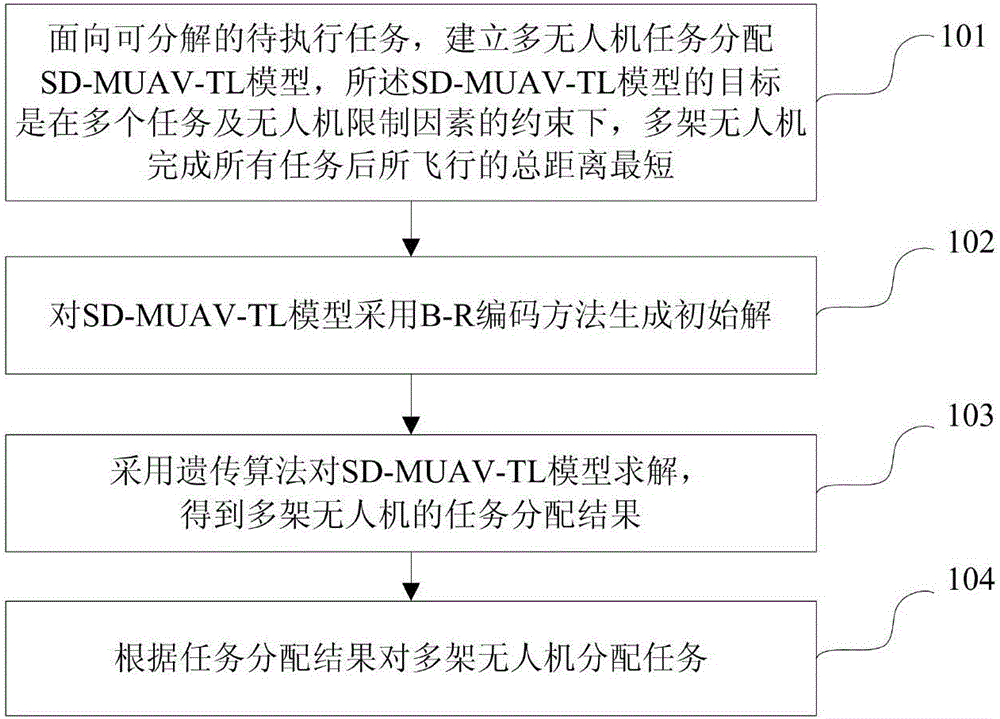
[0113] see figure 1 , figure 1 It is a flowchart of a decomposable task-oriented multi-unmanned aerial vehicle task assignment method according to an embodiment of the present invention. The method is executed by a server that a user performs task assignment. The method includes the following steps:
[0114] Step 101, facing decomposable tasks to be executed, establishing a multi-UAV task allocation SD-MUAV-TL model, the goal of the SD-MUAV-TL model is under the constraints of multiple tasks and UAV constraints, The total distance traveled by multiple drones after completing all missions is the shortest.
[0115] The following takes a specific scenario as an example to describe the establishment process of the SD-MUAV-TL model in detail.
[0116] 1. Scene description:
[0117] On August 3, 2014, a 6.5-magnitude earthquake occurred in Ludian County, Zhaotong City, Yunnan Province. There were thousands of aftershocks, causing a large number of casualties and the collapse of bui...
Embodiment 2
[0195] see Image 6 as shown, Image 6 It is a structural block diagram of a multi-UAV task allocation device based on user needs according to an embodiment of the present invention, the device includes:
[0196] The model building module 601 is used for decomposing tasks to be executed, and establishing a multi-UAV task distribution SD-MUAV-TL model, and the SD-MUAV-TL model is aimed at multiple tasks and UAV constraints Under the constraints of , the total distance traveled by multiple UAVs after completing all tasks is the shortest;
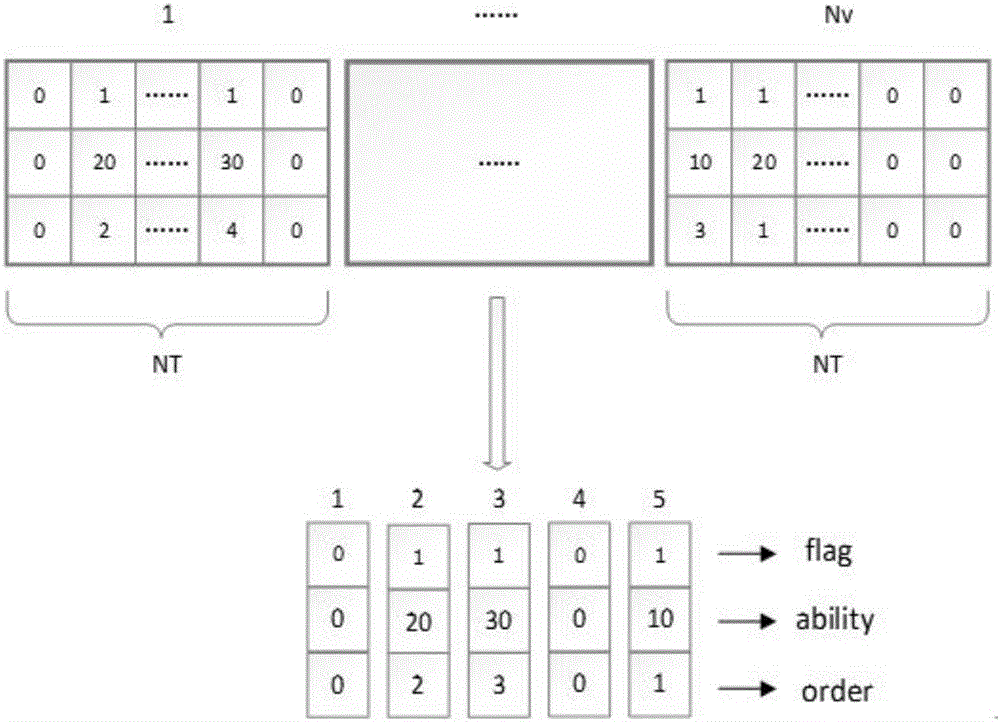
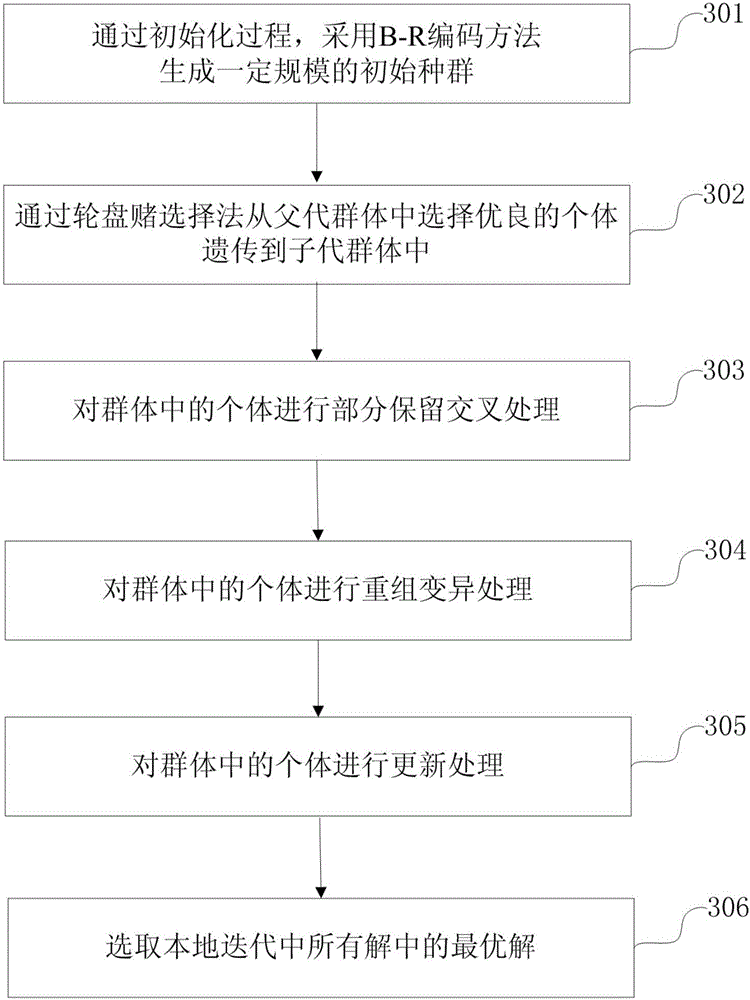
[0197] Initial solution generation module 602, for adopting B-R encoding method to SD-MUAV-TL model to generate initial solution;
[0198] The model solving module 603 is used to solve the SD-MUAV-TL model based on the genetic algorithm to obtain the task assignment results of multiple drones;
[0199] An allocation module 604, configured to allocate tasks to multiple drones according to task allocation results.
[0200] In an alternative ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The embodiments of the invention provide a resolvable task oriented task assigning method and apparatus for multiple unmanned aerial vehicles. The method comprises the following steps: establishing an SD-MUAV-TL model for the task assigning of the multiple unmanned aerial vehicles in terms of a to-be-executed resolvable task wherein the goal of the SD-MUAV-TL model is to ensure that the total distance traveled by the multiple unmanned aerial vehicles is the shortest after they complete their task under the constraints of a plurality of tasks and the limiting factors of the unmanned aerial vehicles; adopting a B-R coding method to the SD-MUAV-TL model to generate an initial solution; using a genetic algorithm to solve the SD-MUAV-TL model to obtain a task assigning result for the multiple unmanned aerial vehicles; and according to the task assigning result, assigning the task to the multiple unmanned aerial vehicles. The embodiments of the invention assign task to a cluster of unmanned aerial vehicles of the same structure. The cluster of unmanned aerial vehicles need to transverse all search objects and complete corresponding search task and with the invention, the total cost for all search tasks is the smallest.
Description
technical field [0001] The present invention relates to the communication field, in particular to a decomposable task-oriented multi-unmanned aerial vehicle task allocation method and device. Background technique [0002] Task assignment of UAVs is a typical collaborative planning problem. By establishing an appropriate mathematical model to carry out reasonable task planning for multiple UAVs, the reconnaissance efficiency of the entire UAV group can be improved, that is, sending multiple UAVs at the same time to The target is reconnaissance, and the total cost of completing all reconnaissance tasks is minimized. [0003] In related prior art, the task allocation problem of UAV is mainly abstracted into: Traveling Salesman Problem (TSP), Vehicle Routing Problem (VRP), Mixed Integer Linear Programming Problem (MILP) and so on. The optimization algorithm adopted for the problem includes A* algorithm, genetic algorithm, ant colony algorithm, etc. [0004] However, in the VRP...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More