Man-machine interaction somatosensory vehicle and control method and device thereof
A human-computer interaction and somatosensory car technology, applied in control devices, motor vehicles, electric vehicles, etc., can solve the problems of long service life, difficult maintenance, and inability to work for a long time, so as to achieve good somatosensory, easy to learn and operate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
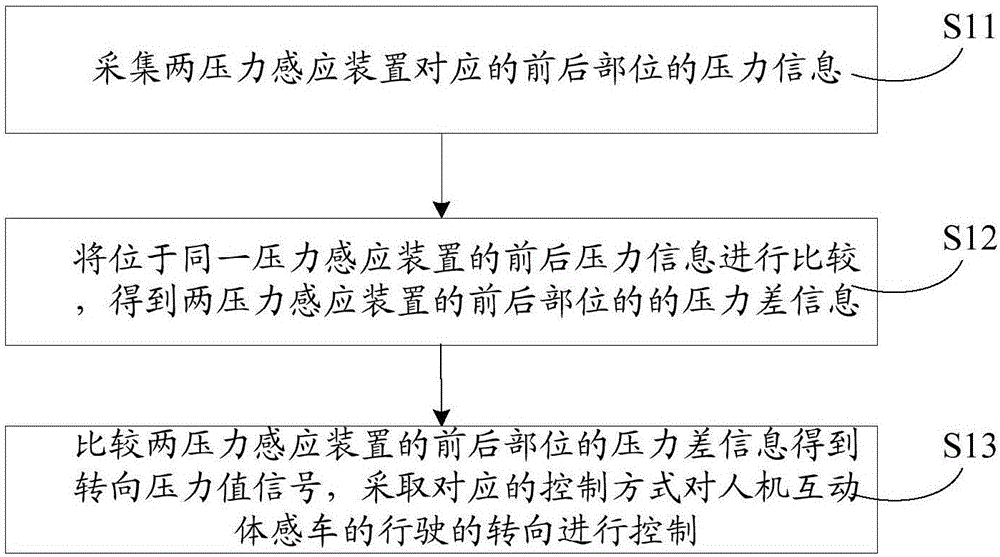
[0055] figure 1 It is a flow chart of a method for controlling a human-machine interactive somatosensory vehicle according to an exemplary embodiment, which is applied to a human-computer interactive somatosensory vehicle equipped with a vehicle body and wheels with two pressure sensing devices, including the following steps:
[0056] S11, collecting pressure information of the front and rear parts corresponding to the two pressure sensing devices;
[0057] S12, comparing the front and rear pressure information of the same pressure sensing device to obtain pressure difference information between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More