

Neutral network theory-based non-linear system adaptive proportional integral control method
A proportional-integral control, nonlinear system technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of closed-loop system instability, dynamic performance degradation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
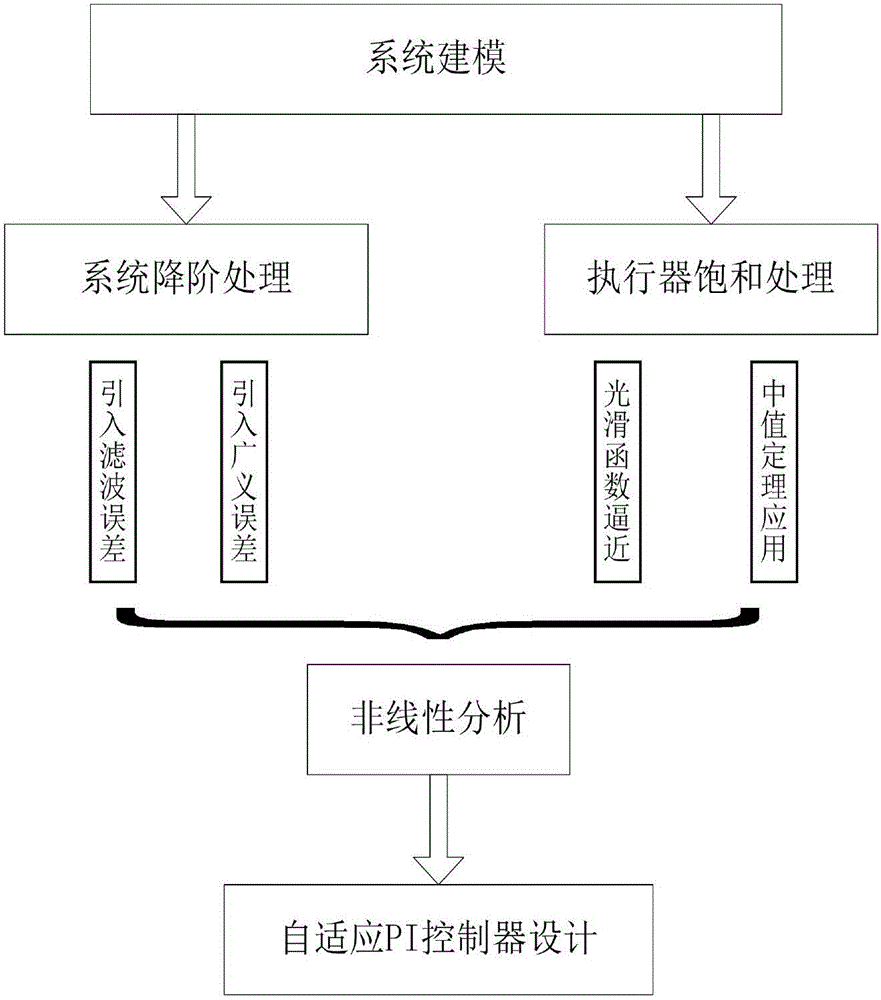
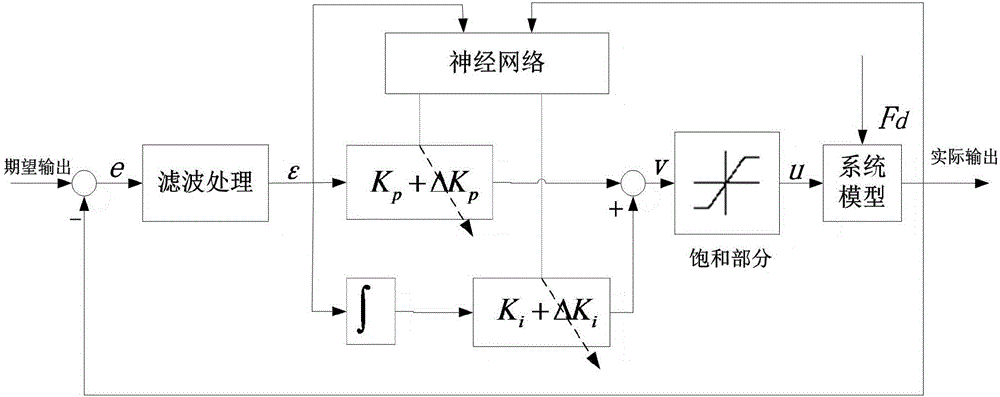
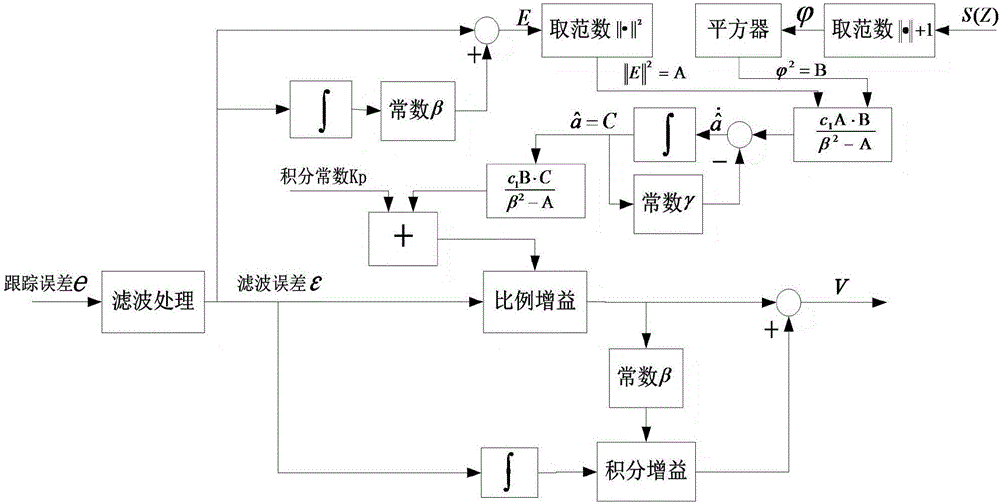
[0055] In this embodiment, the nonlinear system adaptive proportional-integral control method based on neural network theory includes the following steps:
[0056] Step 1, establishing a mathematical model of a nonlinear system containing actuator saturation;
[0057] The nonlinear system with actuator saturation has the following form:
[0058]
[0059]
[0060] y=x 1
[0061] u=H(v)
[0062] Where: x i =[x i1 ,...,x im ] T ∈ R m ,i=1,...,n,x∈R mn is the state vector of the system; y∈R m Represents the output vector of the system; u∈R m Represents the input vector of the system; F(x)∈R m Represents the nonlinear function of the system; B(x,t)∈R m×m represents the control gain matrix of the system; F d (x,t)∈R m Represents the uncertainty part and external disturbance part of the system model; H(v)∈R n Denotes the control vector fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More