

Simple servo drive rod type mechanical arm with variable freedom degrees for carrying operation
A servo-driven, degree-of-freedom technology, which is applied to manipulators, program-controlled manipulators, claw arms, etc., can solve the problems of variable-degree-of-freedom mechanisms for handling manipulators, greater influence of hydraulic oil temperature, and environmental pollution by hydraulic oil. Problems, to overcome the high precision requirements of hydraulic system components, improve stability and reliability, and achieve good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
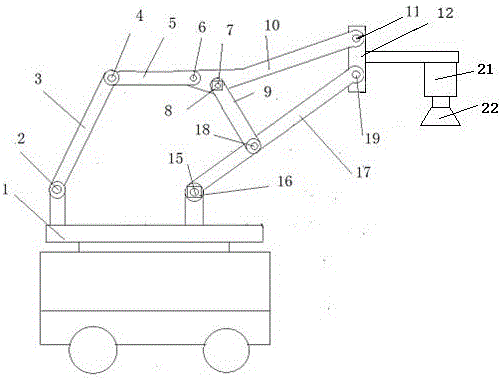
[0007] A simple servo-driven rod-type variable-degree-of-freedom mechanical arm for handling operations, including a base 1, a large arm 17, a wrist link pitch mechanism, a wrist 21, a vacuum suction cup 22, a servo drive device, and a first locking device 8, The second locking device 16; the base 1 is installed on the movable rotary platform; the wrist link pitching mechanism is composed of the wrist link 12 and the pitching mechanism, and the wrist link passes through the ninth coaxial rotating pair 19 and the tenth rotating pair 20 are connected to the boom 17, the pitching mechanism is composed of the active member 3, the first connecting rod 5, the second connecting rod 10 and the third connecting rod 9, and one end of the active member 3 passes through the first rotating pair 2 is connected to the base 1, and the other end is connected to the first connecting rod 5 through the second rotating pair 4; the other end of the first connecting rod 5 is connected to the second c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More