

A rgb-d image registration method based on 2d/3d mode switching
An RGB image, RGB-D technology, applied in the field of RGB-D image registration based on 2D/3D mode switching, can solve the problem of low image registration quality, reduce calculation time, widen application time and space, The effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
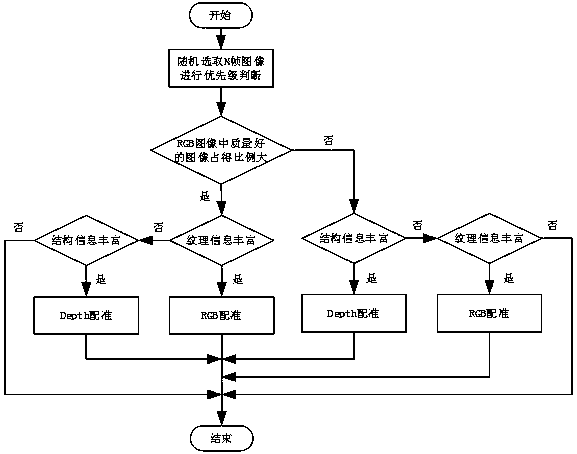
[0026] Step 1. Use the RGB-D sensor to collect environmental information, and output a sequence of RGB images and Depth images;
[0027] Step 2. Randomly extract N sample images from the collected environmental information, respectively detect their RGB image quality α and Depth image quality β, and determine the priority of the registration modality according to the detection results;
[0028] Step 3. Among the N samples, if the ratio of good-quality images in the RGB image to the entire sample is greater than the ratio of good-quality images in the Depth image to the entire sample, the 2D registration method has a high priority; otherwise, the 3D registration method The quasi-method has high priority. If the texture information and structure information in the environment are equally rich, that is to say, the quality of the RGB image and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More