

Visual milemeter method based on RGB-D camera
A technology of visual odometer and camera, applied in computing, image data processing, measuring devices, etc., can solve the problems of expensive price, complex equipment, heavy workload of image processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
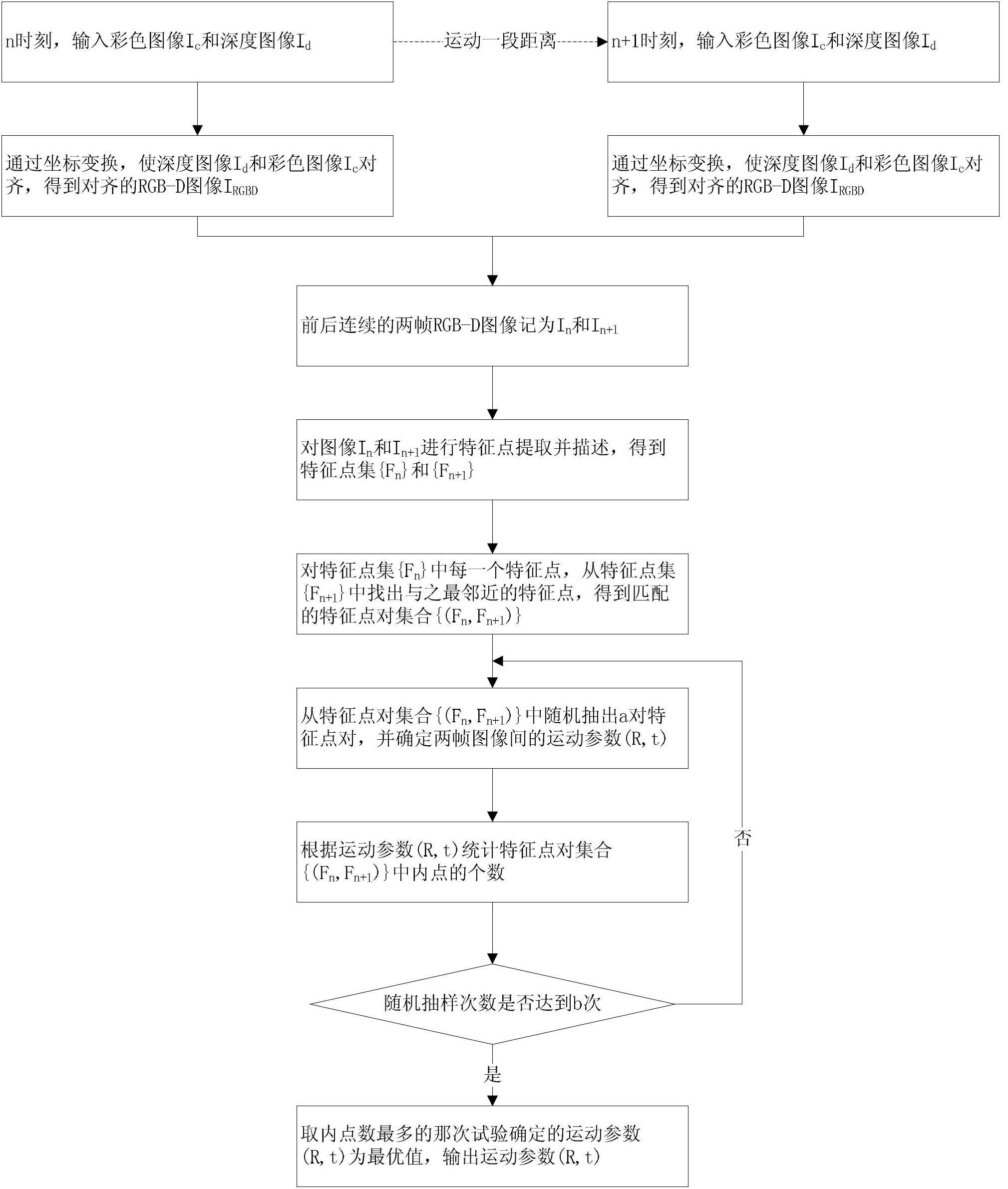
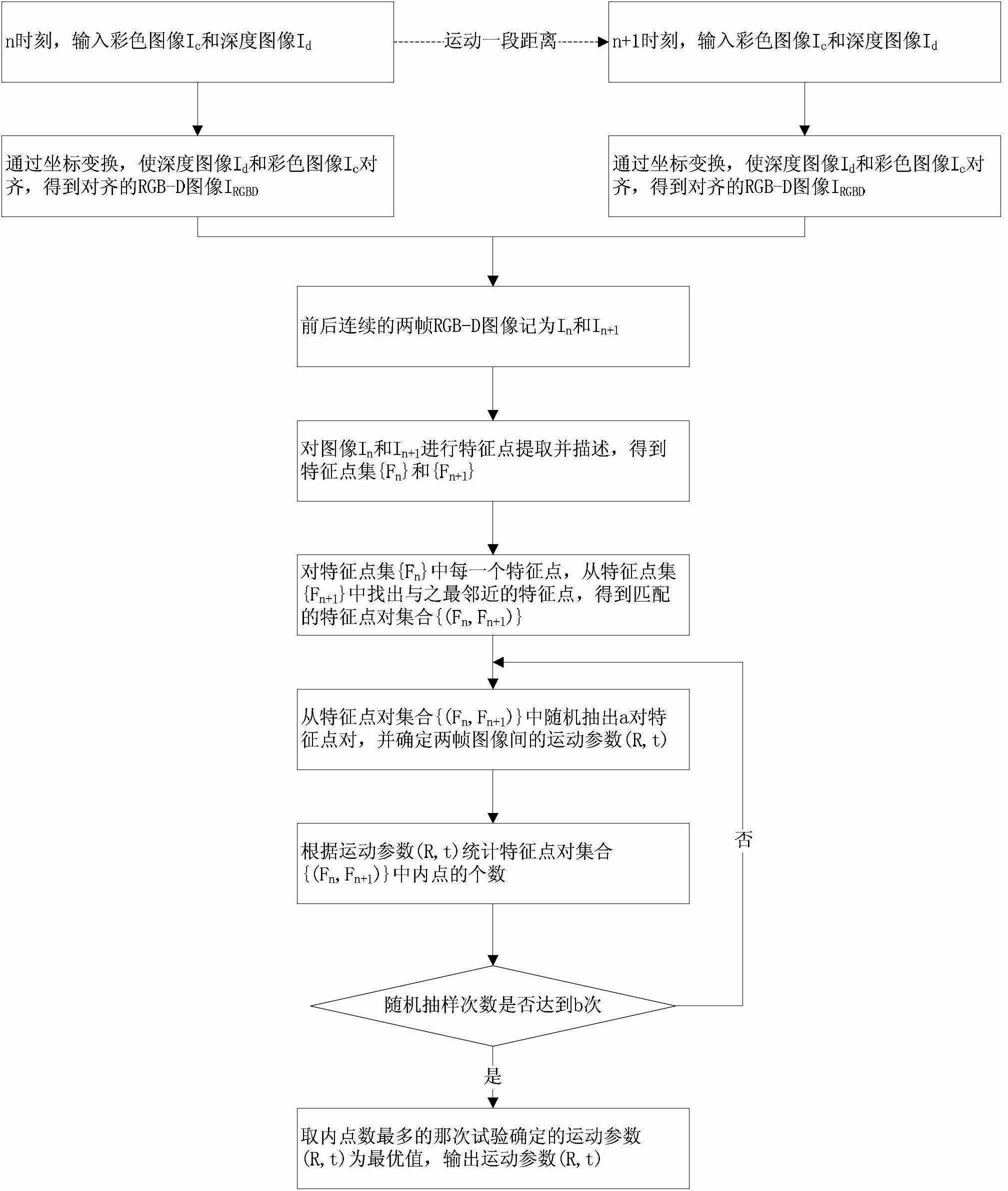
[0047] The method of the present invention will be further described below in conjunction with the accompanying drawings.
[0048] Such as figure 1 As shown, the present invention includes three parts: an RGB-D camera, a computer host and an autonomous vehicle; the computer host is installed inside the autonomous vehicle, and the RGB-D camera is fixed on the top of the autonomous vehicle; the RGB-D camera is connected through a USB interface (or 1394 interface) Connect with the host computer.
[0049] Such as figure 2 Shown, the concrete steps of the inventive method are as follows:
[0050] Step (1). Fix the RGB-D camera on the top of the periphery of the autonomous vehicle to replace the traditional monocular or binocular camera to perceive the environment and output a color image and the depth image .
[0051] Step (2). Since the color camera and the depth camera are in different positions in the RGB-D camera, the images formed by them also project the three-dimensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More