

A Flexible Joint Variable Stiffness Mechanism
A flexible joint and variable stiffness technology, applied in the field of robotics, can solve the problems of small stiffness adjustment range, poor passive stiffness characteristics, and high energy consumption for adjusting stiffness, and achieve a large stiffness adjustment range, small friction, and enhanced load capacity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
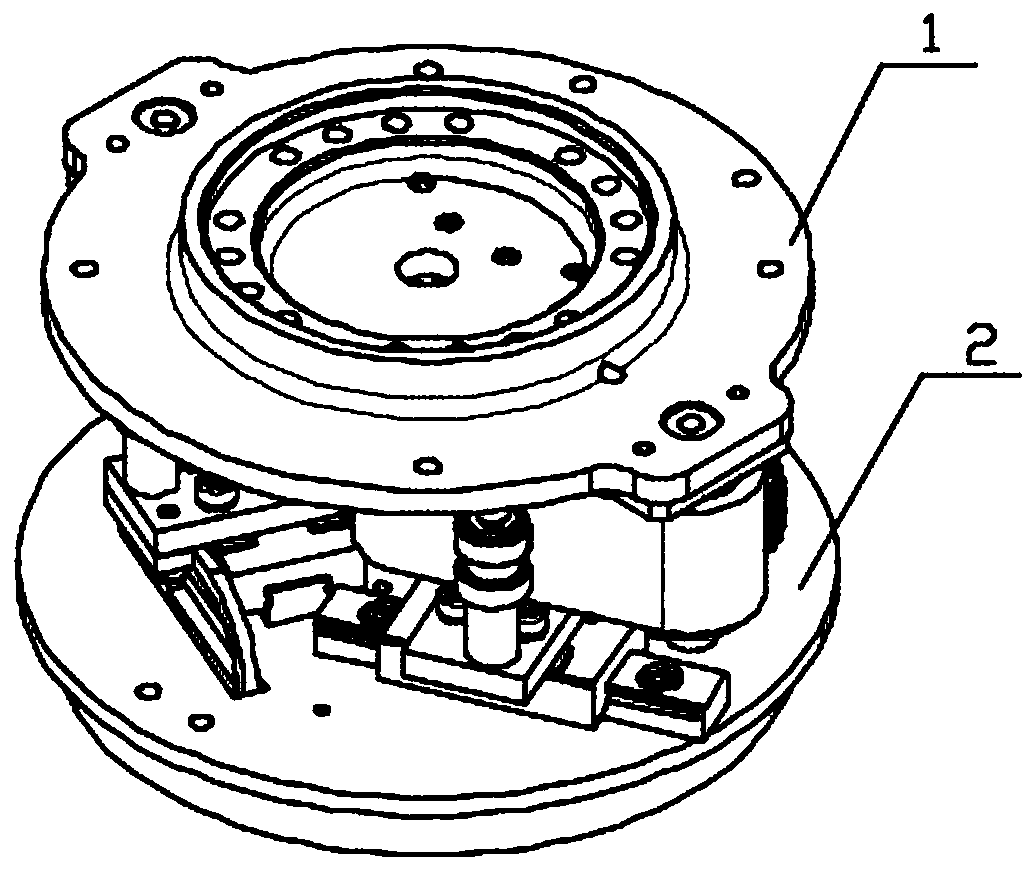
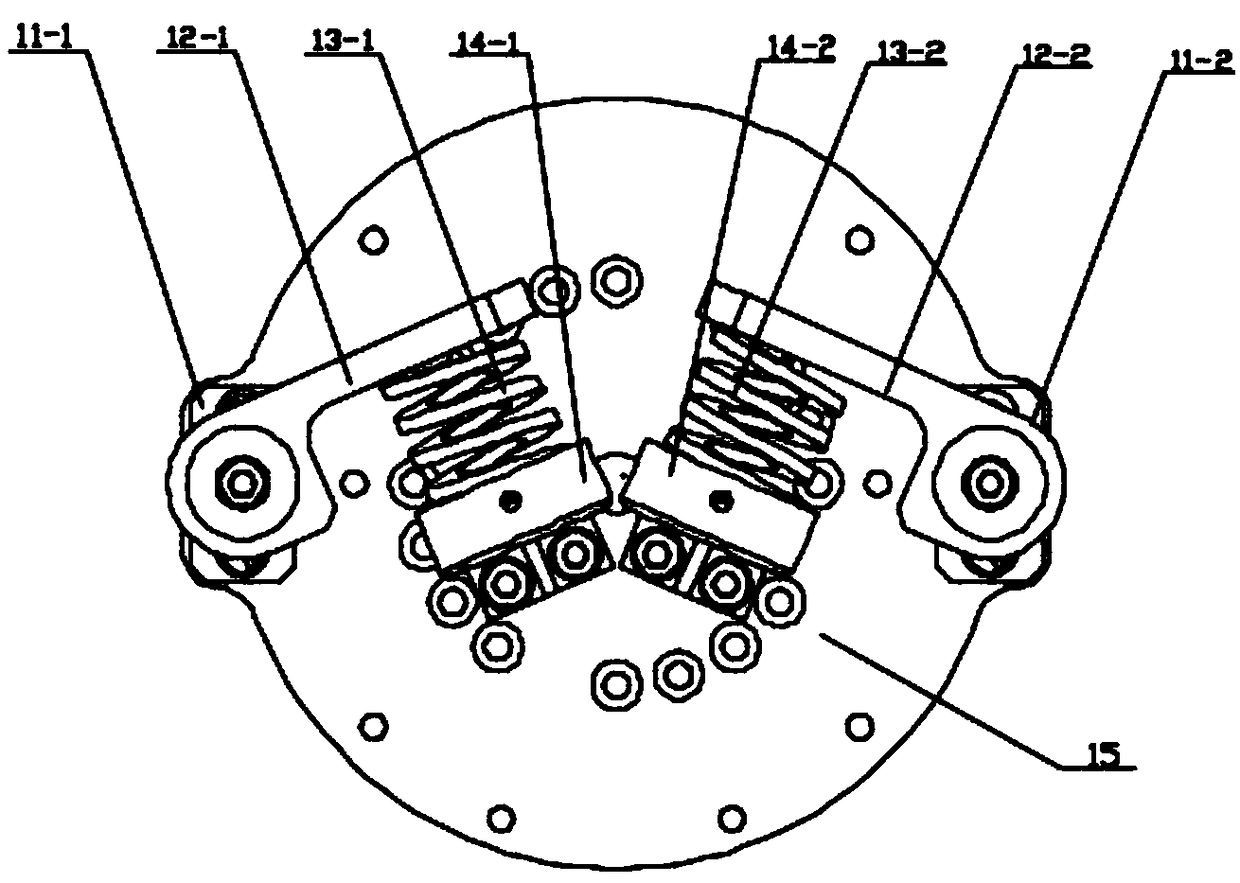
[0025] Combine figure 1 , figure 2 , image 3 , Figure 4 , A flexible joint variable stiffness mechanism, comprising an input structure 1 and an output structure 2, the input structure 1 and the output structure 2 are connected up and down; the input structure 1 includes a pair of guide shafts 11-1, 11-2, A pair of guide rods 12-1, 12-2, a pair of compression springs 13-1, 13-2, a pair of spring mounting seats 14-1, 14-2, and an input plate 15; the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More