

Flexible wearable lower limb assistant exoskeleton suit
A technology of exoskeleton clothing and lower limbs, applied in the field of robotics, can solve problems such as difficult to apply to daily life, complex structure, inconvenient wearing, etc., and achieve the effect of convenient waist wearing, small size and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
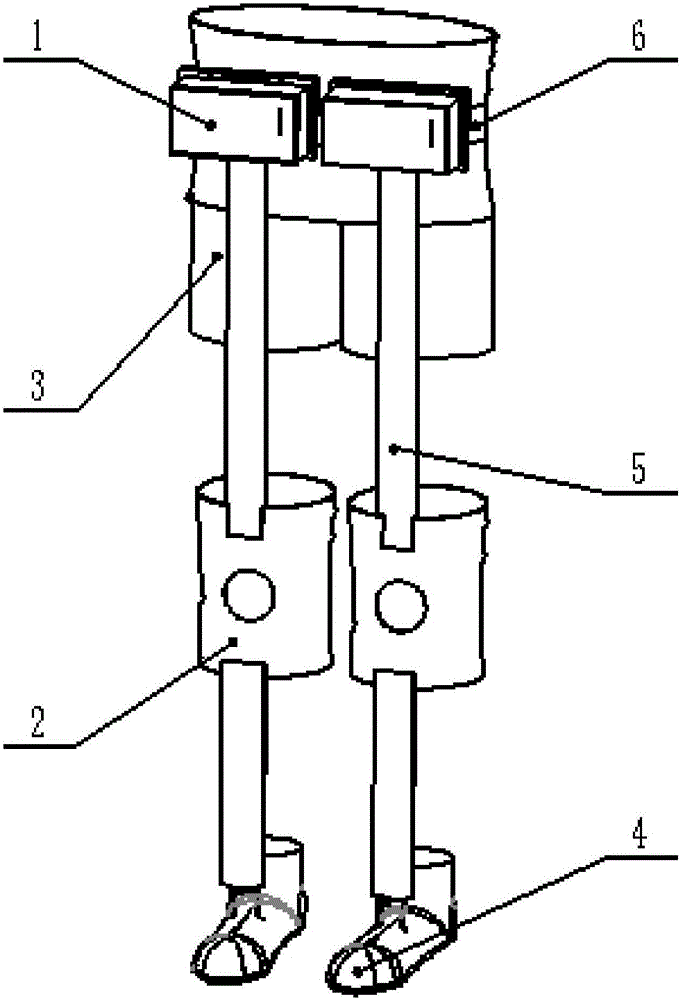
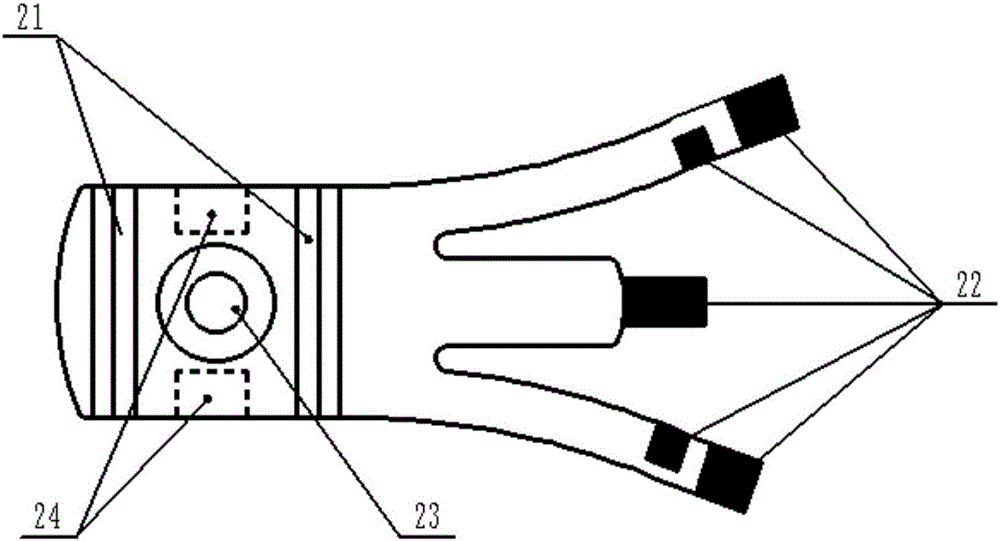
[0029] In this embodiment, the flexible and wearable lower limb power-assisted exoskeleton clothing includes high-waist shorts 3, knee pads 2, shoes 4, a controller, traction belt 5 and two driving devices 1, and the high-waist shorts 3 are located at the left and right hip joints and the sacrum. A gyroscope sensor is installed, and an adjustable belt 6 is fixed on the waist position of the high-waisted shorts, and the two driving devices 1 are symmetrically installed on the adjustable belt 6 on the front of the high-waisted shorts 3, and each driving device 1 All are connected with the upper end of a traction belt 5, the lower end of the traction belt 5 passes through the knee pad 2, and is connected with the shoe 4, and each driving device is used to drive the ankle joint movement of the corresponding side; three gyro sensors and two driving devices They are all connected to the controller; the controller is used to process the data of the three gyroscope sensors and control ...
Embodiment 2
[0035] The connection and positional relationship of each part of this embodiment is the same as that of Embodiment 1, the difference is that the stretchable waist belt 6 and the high-waisted shorts 3 are connected by ultra-thin back-to-back Velcro straps, and are equipped with connecting buckles, adjustable waist size, plastic The buckle is tied at the waist. This design is flexible, light in weight, easy to wear and adjust, and suitable for the daily life of the wearer. The traction belt 5 is a nylon belt with good flexibility and small quality, which is convenient to wear and adjust, and is suitable for the daily life of the wearer. The high-waist shorts 3 are thin elastic pants, which can meet the common needs of wearers in a certain weight range to a certain extent.
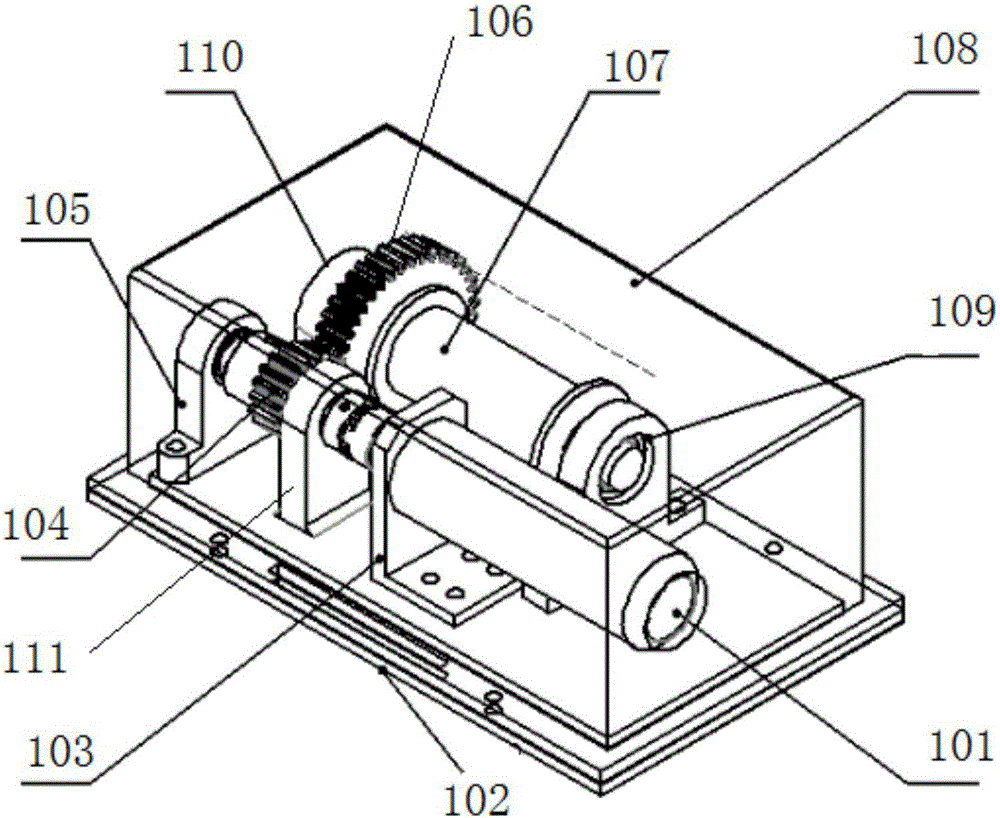
[0036] Base plate 102, pinion 104, bull gear 106, reel 107 and shell 108 and bearing blocks (first bearing block 105, second bearing block 109, third bearing block 111, fourth bearing block) in the described...
Embodiment 3
[0038] The connection and positional relationship of each part of this embodiment is the same as that of Embodiment 1, the difference is that the drive device is hydraulically driven, and the relevant components of the hydraulic drive are also integrated in the shell, and the entire drive device is still placed on the waist.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More