

An automatic control system for an unmanned bus
An automatic control system and unmanned driving technology, applied in control devices, buses, motor vehicles, etc., can solve the problems of low degree of automation, inability to adapt to modern traffic, lack of ability to identify situations, etc., to achieve convenient operation and structure. reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
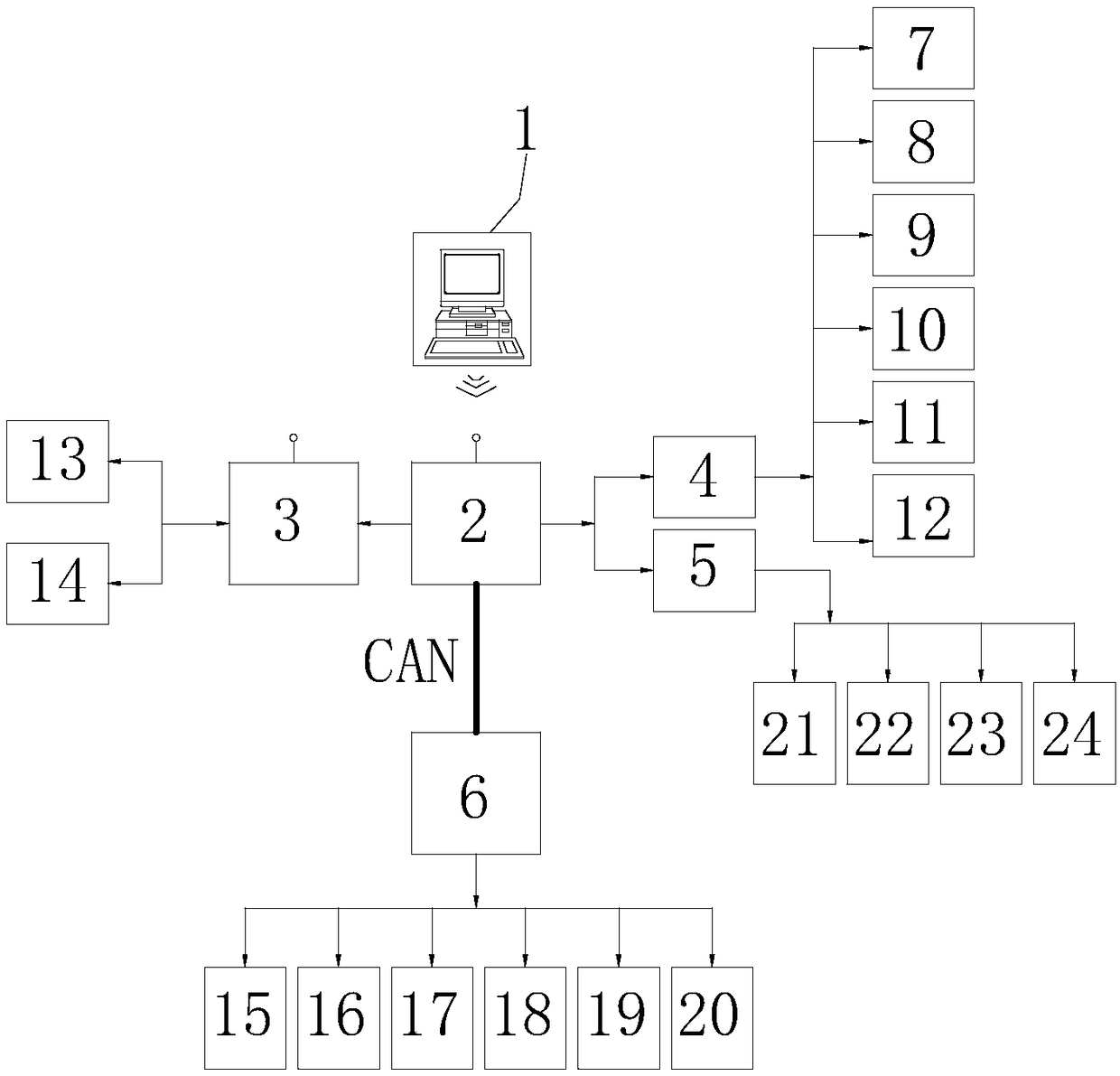
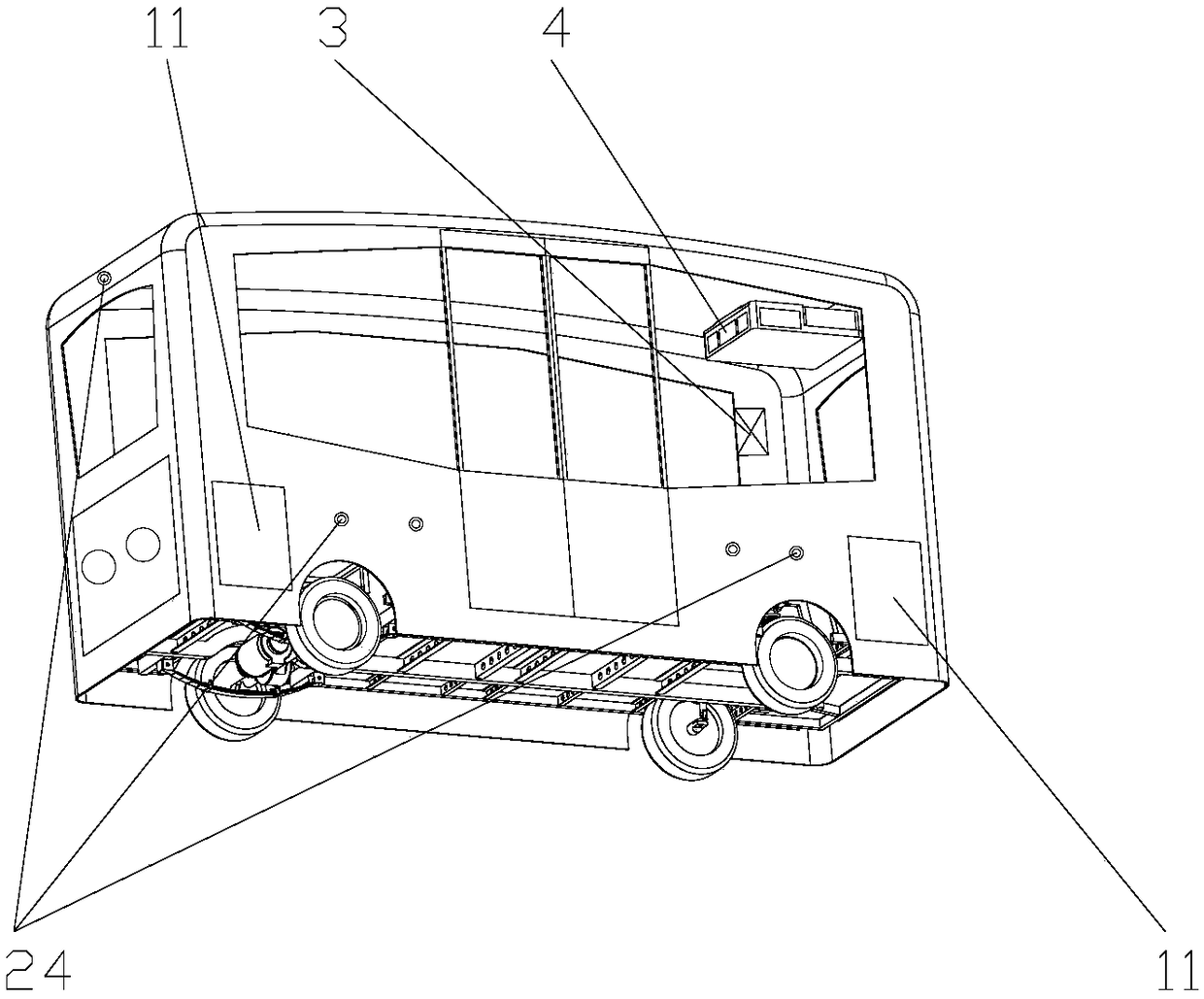
[0021] Embodiment 1 of the present invention: as figure 1 and figure 2 As shown, the automatic control system includes a main control room 1, a PLC control system 2, an on-board computer 3, a navigation system 4, an avoidance and collision avoidance system 5 and a vehicle controller 6. The main control room 1 is wirelessly connected with the PLC control system 2, and the PLC control system 2 receives the instructions from the control center of the main control room 1 and executes the corresponding instructions, and at the same time feeds back its own status to the control center of the main control room 1 in time. The vehicle-mounted computer 3 , the navigation system 4 , the avoidance and collision avoidance system 5 and the vehicle controller 6 are all electrically connected with the PLC control system 2 . The vehicle controller 6 receives instructions from the PLC control system 2 and controls the driverless bus. The vehicle-mounted computer 3 is electrically connected w...
Embodiment 2
[0024] Embodiment 2: as figure 1 and figure 2 As shown, the automatic control system of this driverless bus includes a main control room 1, a PLC control system 2, an on-board computer 3, a navigation system 4, an avoidance and collision avoidance system 5 and a vehicle controller 6. The main control room 1 is wirelessly connected with the PLC control system 2, and the PLC control system 2 receives the instructions from the control center of the main control room 1 and executes the corresponding instructions, and at the same time feeds back its own status to the control center of the main control room 1 in time. The vehicle-mounted computer 3 , the navigation system 4 , the avoidance and collision avoidance system 5 and the vehicle controller 6 are all electrically connected with the PLC control system 2 . The vehicle controller 6 receives instructions from the PLC control system 2 and controls the driverless bus. The navigation system 4 is connected with ground base statio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More