

Tree-climbing robot
A technology for robots and tree grabbing, applied in the field of robots, can solve the problems of slow crawling speed, many degrees of freedom of movement, complex structure, etc., and achieve the effect of simple control and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further elaborated below in conjunction with the accompanying drawings of the description.
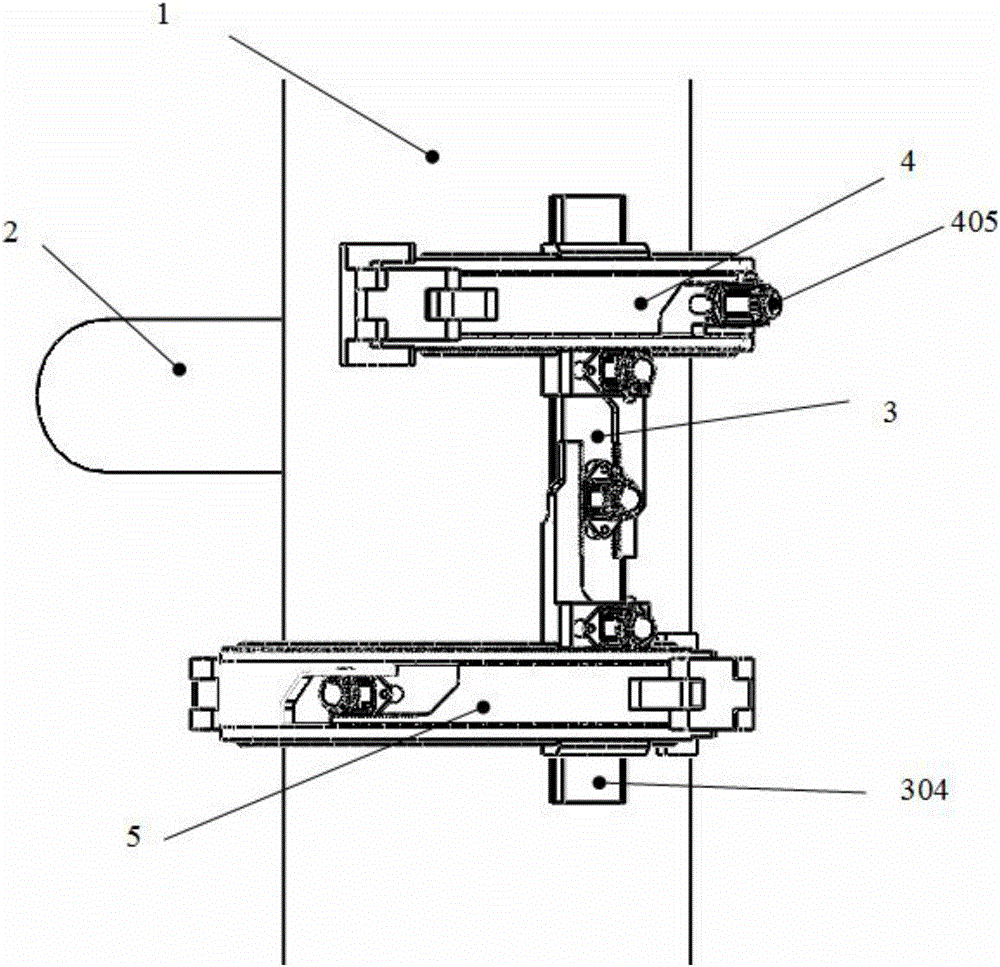
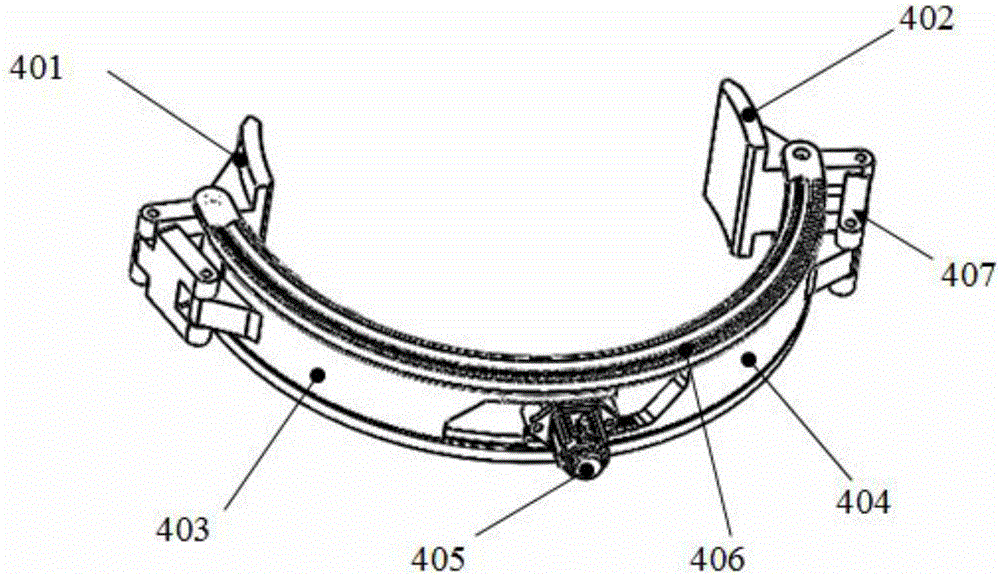
[0019] Such as figure 1 As shown, a tree climbing robot of the present invention has a trunk support part 3, a first tree-grasping arm 4 and a second tree-grasping arm 5, wherein the first tree-grasping arm 4 and the second tree-grasping arm 5 are respectively connected with the trunk support part The upper and lower parts of 3 are mechanically connected, and the first tree-grasping arm 4 and the second tree-grasping arm 5 are mutually symmetrical in structure; The racks of the two moving parts of the torso engage.
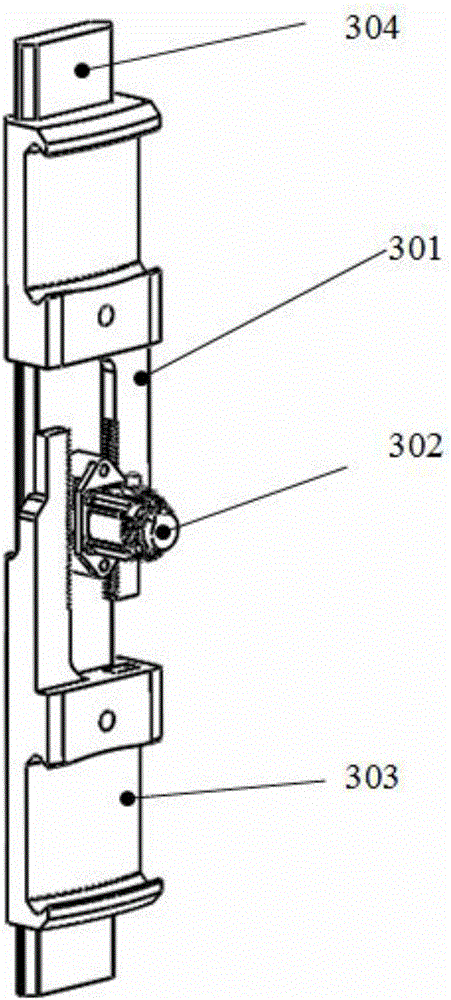
[0020] Such as image 3 As shown, the trunk supporting part 3 has a supporting plate 304, a first trunk moving part 301, a second trunk moving part 303 and a telescopic driving part 302, wherein the telescopic driving part 302 is fixedly installed on the supporting board 304, and the first trunk The moving part 301 and the second tor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More