

Agricultural plant protection unmanned aerial vehicle and obstacle avoidance and spraying path planning method for same
A plant protection UAV and path planning technology, which is applied in the field of agricultural plant protection UAV obstacle avoidance spraying path planning method and UAV field, to achieve the effect of reducing the area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0042] Specific embodiment 1: The obstacle avoidance path planning method for plant protection drones in this embodiment, the method is used to plan the flight path, the flight path includes at least one straight spraying path and at least one turning path, each straight spraying path Including a starting point and an end point, each turning path represents a path from the end point of a straight spraying path to the starting point of the next straight spraying path, characterized in that the method includes:
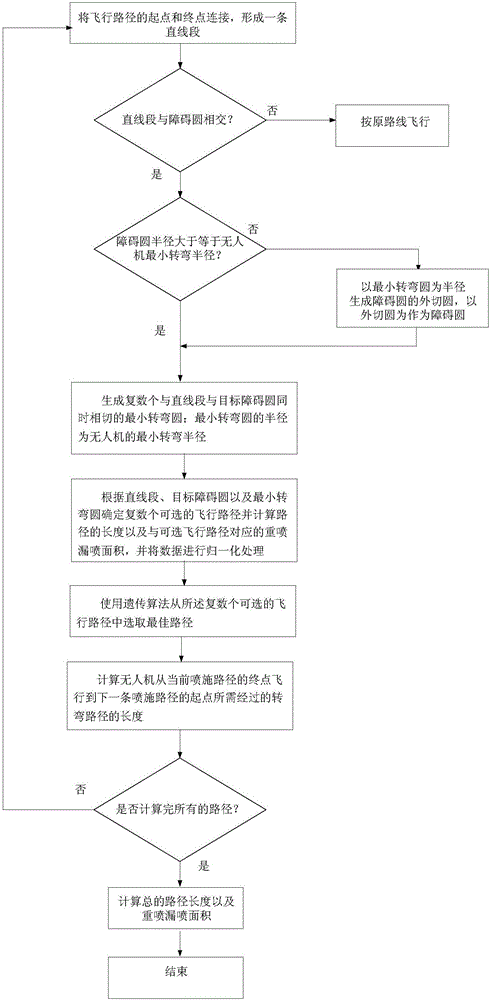
[0043] Step 1) From the first straight line spray path, the starting point and the end point of the current flight path are connected to form a straight line segment for representing the original flight path;
[0044] Step 2) Judging whether the straight line segment intersects with the obstacle circle, if it does not intersect, then fly straight along the original route, if it intersects, then perform step 3); the obstacle circle is a model used to represent the positio...
specific Embodiment approach 2
[0057] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is:
[0058] The length of the flight path of each optional path in step 5) is calculated by the following formula:
[0059]
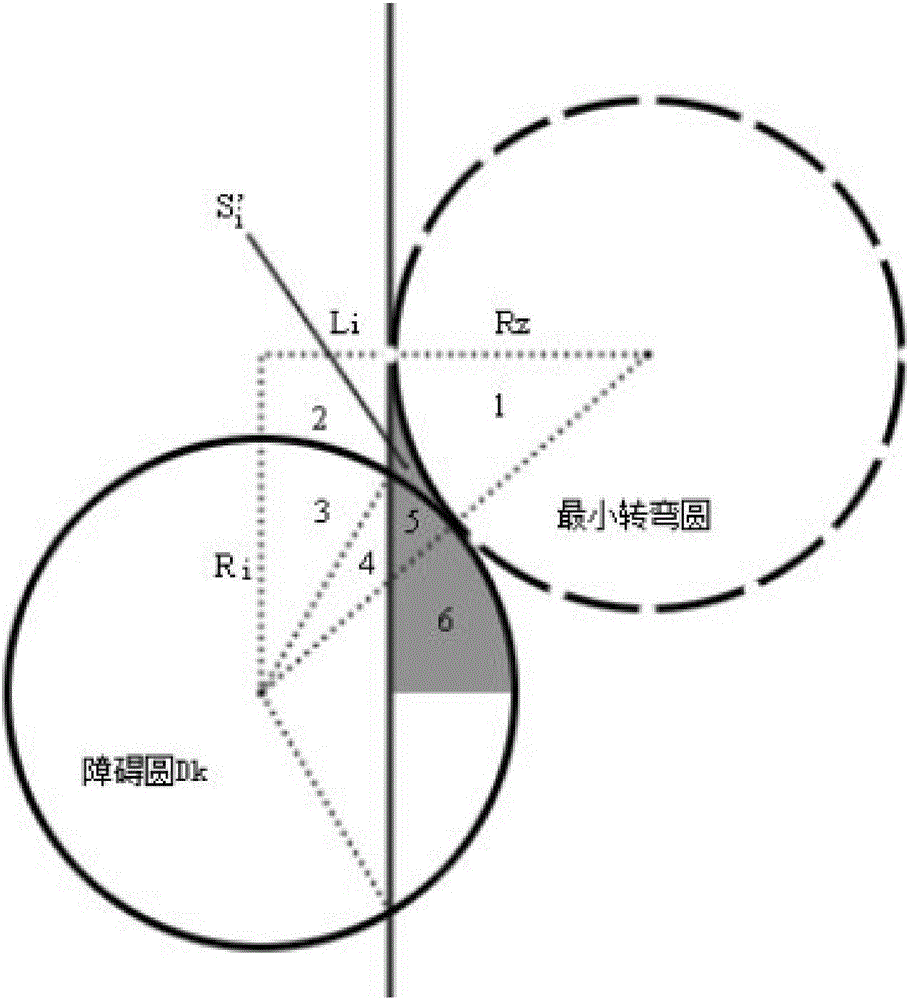
[0060] Where N is the total number of obstacles that must be avoided on a single path, N 1 is the number of obstacle circles on the opposite side of the obstacle circle and the minimum turning circle, N 2 is the number of obstacle circles on the same side as the obstacle circle and the minimum turning circle, and satisfies N 1 +N 2 =N; where b is the length of the straight line; R z is the minimum turning radius of the UAV;
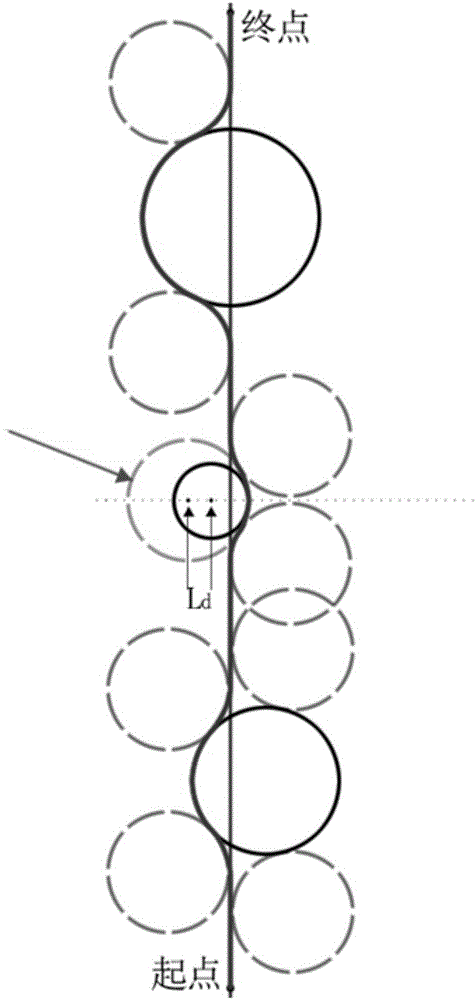
[0061] When the radius of the obstacle circle is greater than or equal to the minimum turning radius of the UAV, L d is the distance from the center of the obstacle circle to the straight line segment, R i is the radius of the obstacle circle;
[0062] When the radius of the obstacle circle is sma...
specific Embodiment approach 3
[0065] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is:
[0066] Step 5) in each of the optional paths of the re-spray missed spray area is calculated by the following formula:
[0067]
[0068] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More