

Unmanned aerial vehicle three-dimensional trajectory guidance method based on inverse dynamics
An inverse dynamics, three-dimensional trajectory technology, applied in three-dimensional position/channel control, non-electric variable control, control/regulation system and other directions, can solve the problems of control effect coupling effect and other problems, achieve convenient parameter setting, clear physical meaning, Simple control structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
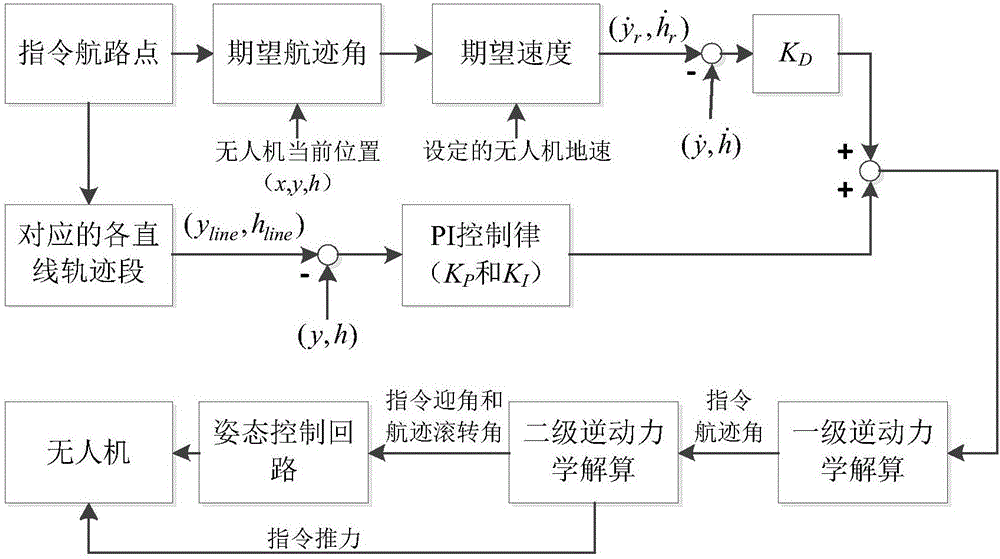
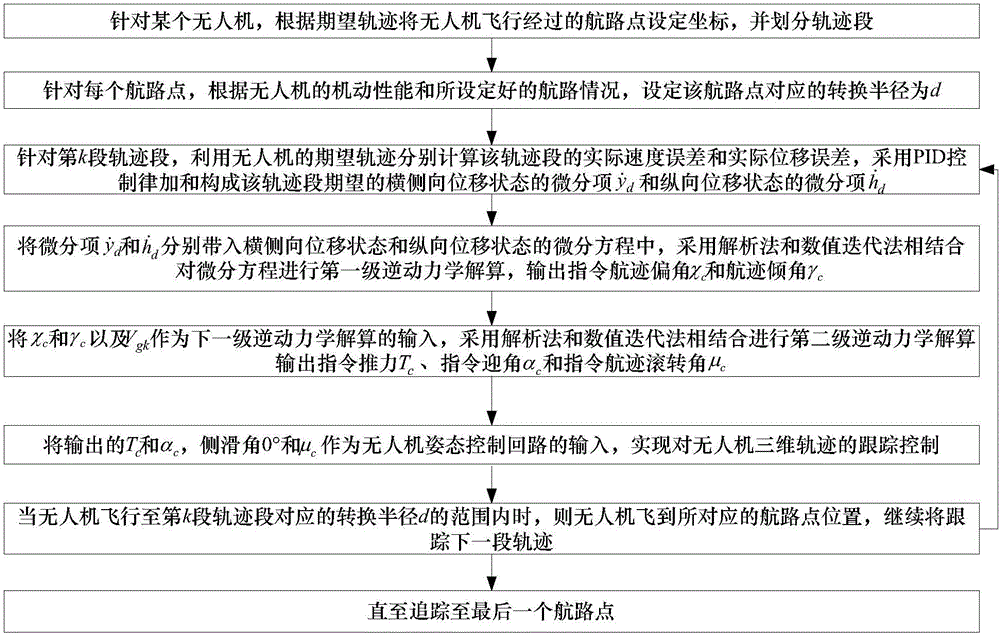
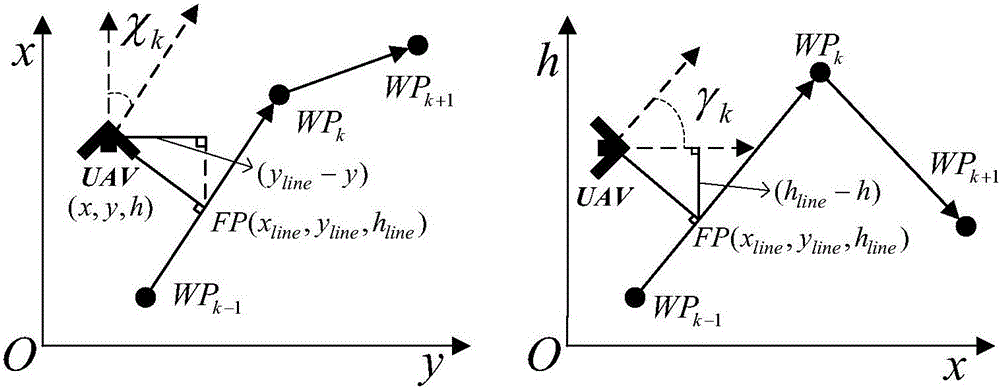
[0059] The present invention is an unmanned aerial vehicle three-dimensional trajectory guidance method based on inverse dynamics. By combining the analytical method and the numerical iteration method, the position state equation of the unmanned aerial vehicle is sequentially solved by first-level inverse dynamics, and the unmanned aerial vehicle is The ground speed and track angle state equations are solved by two-level inverse dynamics, and the command thrust, command angle of attack and command track roll angle of the UAV are obtained, and then these commands are input into the designed attitude control The loop can control the actual ground speed and position of the UAV. At the same time, PID control is used to make the actual position of the UAV converge on the reference trajectory between waypoints.
[0060] The structure block diagram of the wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More